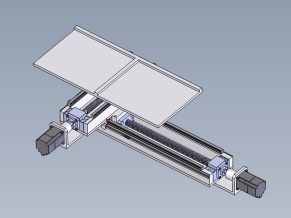
轴测图
以蝗虫为仿生对象,对其生理结构进行适度的简化,进而设计出一种具有四杆机构的仿蝗虫跳跃机器人.该机器人采用四杆机构作为跳跃的模型,由于是杆件结构,因而结构简单,制造方便,控制难度相对较低,根据该跳跃机器人的控制需求,设计编写了驱动电路。
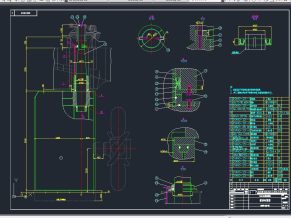
俯视图
主视图
左视图
细节
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: