预览图1
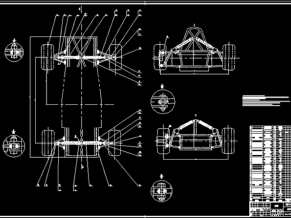
这款水下机器人(无人遥控潜水器)3D模型的系统组成包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和凯夫拉零浮力拖缆等单元部件。下潜深度大于1000米的ROV称为深海ROV.主要用于深海勘探,科考等任务。本模型为美国DSSI公司的XLS系列,最大下潜深度为2500米。探测系统主要包括有1个七功能机
软件版本:SolidWorks
文件格式:Sldprt/Sldasm
这款水下机器人(无人遥控潜水器)3D模型的系统组成包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和凯夫拉零浮力拖缆等单元部件。下潜深度大于1000米的ROV称为深海ROV.主要用于深海勘探,科考等任务。本模型为美国DSSI公司的XLS系列,最大下潜深度为2500米。探测系统主要包括有1个七功能机械手,1个五功能机械手,1台摄像机,1部照相机及各种传感器等。并拥有有独立的推进系统。
无人遥控潜水器,也称水下机器人。一种工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有,有缆遥控潜水器和无缆遥控潜水器两种,其中有缆避控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。

预览图2
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!