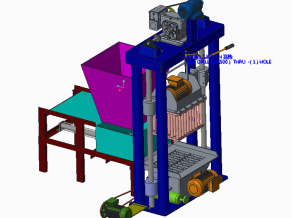
预览图1
软件版本:Proe5.0 文件格式:prt文件﹑装配部件 随着轮边驱动系统、计算机技术和控制理论的发展和成熟,独立驱动轮式移动机器人正逐步向着高效、多功能方向发展,并逐步开始在军用领域和民用领域得到大量的应用。由于轮边驱动系统的诞生而带来的轮式移动机器人内部结构的变化和受控性的改变,在科研领域有着重要的意义。
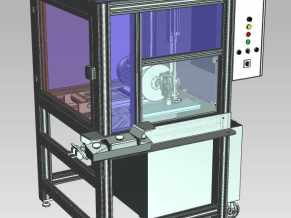
预览图2
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:

















")








