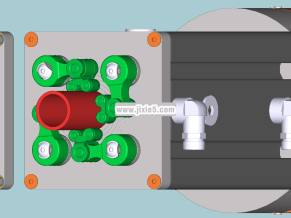
预览图1
三维建模软件:SolidWorks(solidworks 2014) 基于全柔性胸鳍的新型模块化仿生水下机器人,分析了鲼类胸鳍的水动力模型,将胸鳍的运动分解为垂直机体纵轴线方向上的上下弯曲拍动与以胸鳍主干骨为轴心的扭转运动。整机包括主机体、左柔性胸鳍模块、右柔性胸鳍模块及尾鳍模块。各模块通过鳍连接架与主机体连接。左右柔性胸鳍模块与关于机体纵剖面镜像对称。鳍肋结构按照飞机对称翼型设计,鳍肋通过一字型胸鳍主干骨及钢丝串连、拼接成剖面为流线型的胸鳍模块。
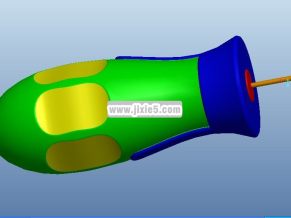
预览图2
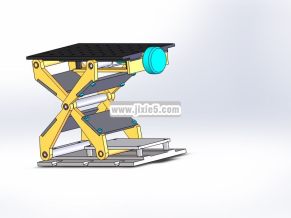
预览图3
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: