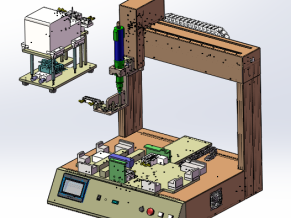
正面图
本模型为停车场汽车搬运AGV机器人机械结构部分的整体结构,采用麦克纳姆轮加全向轮的行走方式,利用双轴直角升降机作为驱动力,以及可伸缩的推杆结构,再加上整机的伸缩功能,实现对汽车的托起与搬运,360度无死角自转,超低车身,可以轻松进入汽车底盘,该模型作为新构型,为汽车搬运整体设计师提供新的设计思路,拓展更多可能性。
模型介绍
全视图
组件图
模型树图
透视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: