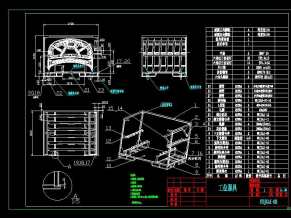
侧面图
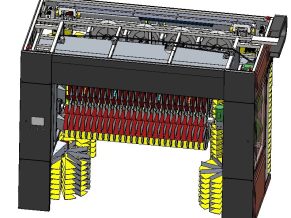
方案中使用并联机器人(蜘蛛手)进行分拣,分拣原理:产品从输送线前端来料,视觉捕捉并进行坐标定位,通过旋转编码器对产品进行定位追踪性能:可分拣混产的产品,效率80pcs/min。
蜘蛛手
蜘蛛手分拣
全部图纸文件
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: