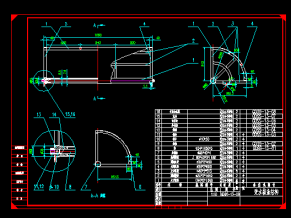
轴测图
手术斯图尔特平台,是一种用于精密位置和运动控制的特殊机电一体化系统,该平台有多种变体,但大多数都有六个线性致动的支腿,支腿平台连接的组合有所不同。完整的组件是一个并联的机器人系统,由连接到固定底板的刚体顶部或移动板组成。顶板的中心至少由三个坐标定义,目的是在3D空间中移动该中心点。by努曼・加富尔
上部
俯视图
底座
渲染图
侧视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: