三维
工业作业的机器人设计模型主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。图1a、b表示弧焊机器人和点焊机器人的基本组成
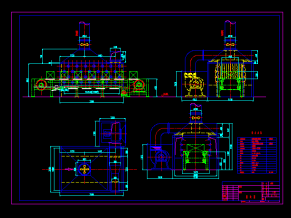
零件
套图
等轴测
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:









![[山西]矿业集团脱盐水项目全套工艺设备图纸](http://img.jixie5.com/d/file/2020/06/09/f5d86b340c1e9c43fdcdf967781332fe.jpg@!l)