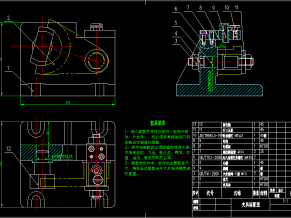
机器人通用关节纵剖图
此款机器人关节为4轴、6轴协作机器人通用关节,协作机器人每个轴内置该关节,可以有效解决生产效率。关节内部主要通过电机,谐波减速机,码盘,编码器,RDM,刹车等部件,该关节实用性强,通用性好,4轴,6轴用此关节加上外观造型就是很好的协作机器人。本模型建模精巧,可供大家探讨学习!
机器人通用关节模型
机器人通用关节四视图
机器人通用关节内部结构
机器人通用关节横剖图
关节电机
PCBA功率板
谐波组件
谐波组件剖视图
链接轴-输出码盘组件
码盘
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: