总图
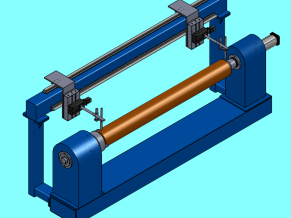
本工作站采用单机器人双工位的焊接方式。由于工件焊缝为连接双面角焊缝,且工件焊缝相对集中,因此将工件放在和焊接机器人相互协调运动的变位机上,然后再对其进行焊接。
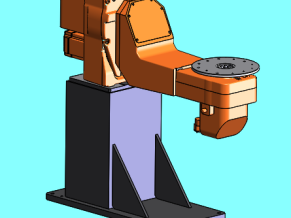
该机器人焊接工作站主要包括弧焊机器人、电弧跟踪系统、工件寻位系统、系统集成控制柜、焊接电源、焊接变位机、焊接夹具、清枪站、冷却水箱、外围防护栏等组成。
工件装卸方式:由于工件体积较大且重量较重,因此工件装卸建议采用吊装方式。
焊接工艺:焊接时,人工先将预点完成的工件用工装夹具夹装好,然后装夹在焊接变位机上,启动机器人进行焊接。

侧视图

俯视图

主视图