前面
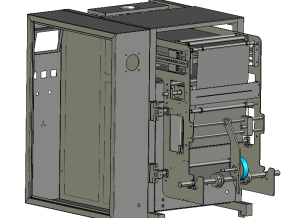
该模型为挂轨巡检机器人,动力采用电机带动伞齿轮,伞齿轮带动齿轮传动动力到主动轮上,在导轨上进行行走,其下悬臂为连杆机构,通过电机带动。可进行高度的调节。
后面
上面
下面
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:


























三维SW2015带参")


