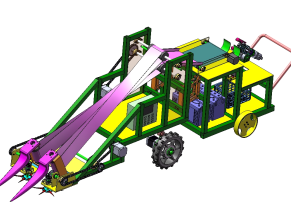
本设计为基于麦克纳姆轮技术的抛射灭火机器人。使用麦克纳姆轮可以完成全方位运动,可以实现前行、横移、斜行、旋转,满足火场的特殊通行条件。借鉴了古代投石机原理,灭火弹采用抛射方式,通过电机控制,输出端每旋转一圈,四连杆机构完成一次投射和装填动作,具有投射距离远,发射速度快的特点,使用转盘式大容量弹仓,可以填装多个灭火弹,车体四周安装探测监视装置,实时传输火情信息。建模为sw2016版本,零件尺寸可进行编辑,欢迎下载!



申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!