

基于机械蜘蛛手的摆盘机
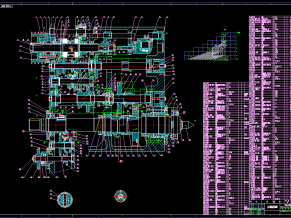
本设备为基于机械蜘蛛手的摆盘机,主要由机架、机械蜘蛛手、产品输送皮带线、托盘输送线、上料/下料码垛模组等组成,该设备是一种采用三轴并联机器手的自动化设备,主要用于自动装盘与摆盘工作。它可配置视觉检测(按需),并通过吸具将物料快速地吸取至托盘内。蜘蛛手摆盘机具有高速、稳定性优的特点。本模型建模精巧,sw2023版本,另含x-t通用格式,可供大家参考!
【详细说明:蜘蛛手摆盘机的主要组成部分包括物料输送装置、蜘蛛手并联机器人和盘子输送装置。物料输送装置负责将待装盘的物料输送到指定位置;蜘蛛手并联机器人则负责抓取物料并按预定轨迹移动,实现自动装盘与摆盘;盘子输送装置则将装好盘的盘子输送到下一环节。通过引入蜘蛛手并联机器人,蜘蛛手摆盘机实现了自动装盘与摆盘,从而大大提高了生产效率。此外,蜘蛛手摆盘机还具有以下优势:
(1)提高生产效率:机器人的操作速度远高于人工,可以在短时间内处理大量的物料。
(2)提高精度:机器人的操作精度高于人工,可以确保每个物料都按照统一的标准放置在盘子上。
(3)降低人工成本:机器人可以连续工作,无需休息,从而降低了人工成本。
(4)提升产品质量:由于机器人的操作精度高,所以产品的质量可以得到保障。
展望未来,随着技术进步,蜘蛛手并联机器人的应用领域将不断扩大。除了食品加工领域,蜘蛛手摆盘机还可以应用于其他需要自动装盘与摆盘的领域,如医药、物流等】

基于机械蜘蛛手的摆盘机内部主体

机械蜘蛛手

托盘输送线

产品输送皮带线

上料码垛模组

下料码垛模组

机架

基于机械蜘蛛手的摆盘机轴测图

基于机械蜘蛛手的摆盘机主视图

基于机械蜘蛛手的摆盘机侧视图

基于机械蜘蛛手的摆盘机俯视图

源文件
















――SW2023版本,另含x-t通用格式")
3D+BOM表【SW2023版本,另含x-t通用格式】")


上料机――sw2023版本,另含x-t通用格式")


――sw2023版本,另含x-t通用格式")
――sw2023版本,另含x-t格式")
