

外观
总装配文件:\Workspace\总装.iam
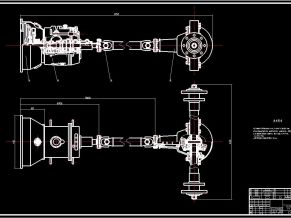
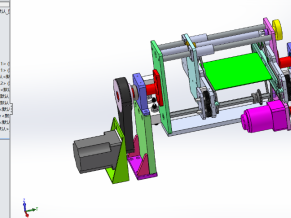
主体机器人通过壳体上的挂绳孔可从山崖上下降,在下降过程中,主体机器人两端的机械手可以抓取挂在山崖上的垃圾,将垃圾放在主体机器人内部的仓体内。同时通过两侧的行星轮系实现腿部和手部的同时旋转,保证腿部实时与山体接触,有效防止主体机器人的刮伤或者因擦碰导致对的失控。
分离机器人在主体机器人达到山谷时与主体分离,此时主体机器人的作用主要是垃圾存储和压缩功能。分离机器人可以在一定范围内移动拾取垃圾,将垃圾存放在自身的垃圾仓内,在自身垃圾仓存满时,向主体机器人中转运垃圾,待此区域清理干净或者电池电量报警时,发出信号与主体吸附在一起,返回山坡上。

渲染

侧边

细节
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!






















(含cad图纸)")
")
cad图纸+1.1万字说明书+开题报告")