空陆两栖机器人
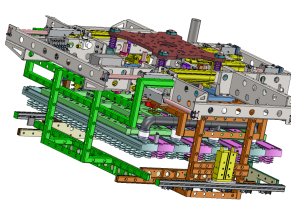
本模型为空陆两栖机器人,是一款可由四轮车形态转变为四翼无人机的机器人,由8个直流无刷电机、若干舵机和碳纤维板构成的轮圈骨骼组成。四旋翼由直流电机直接驱动,四轮车由直流电机经过齿轮传动带动大齿圈旋转进而带动车轮行走,创意模型,x-t通用格式,可供大家参考!
空陆两栖机器人细节图
空陆两栖机器人轴测图
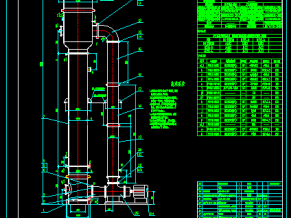
空陆两栖机器人主视图
空陆两栖机器人侧视图
空陆两栖机器人俯视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: