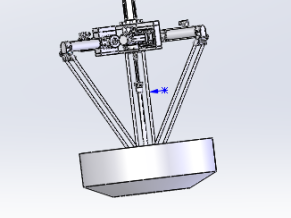
并联机器人
联机构由于具有刚度大、承载能力强、位置误差不累计等特点,在应用上与串联机构形成互补,已成为空间机构学的研究热点。目前,Stewart平台并联机构已经在航空、航天、海底作业、地下开采、制造装配等行业有着广泛的应用。尽管并联机构的实际应用和理论研究取得了大量的研究成果,但是在运动学、奇异性、动力学方面仍然存在一些有挑战性的问题。模型文件含参数可以编辑,欢迎下载。
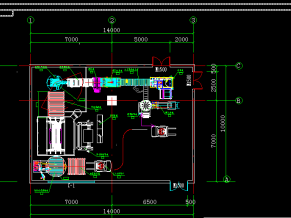
主视图
侧视图
俯视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: