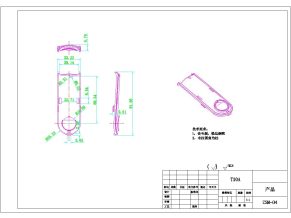
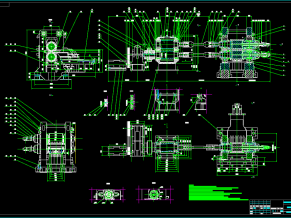
三维轴测图
为解决现阶段国内家禽养殖中成禽出售时抓捕带来的高劳动强度,徒手抓捕中的危险以及弄脏衣物等方面存在的问题;本项目设计研究的禽类抓捕手推车使用简单的磁力自控机构实现禽类的单个抓捕;使该禽类抓捕车能够在小规模养殖厂上通过作业实现禽类的便捷抓捕;作业时将抓捕车向禽类推进,使禽类进入抓捕车中,以此进入到抓捕框中,依靠弹簧磁铁设计的自动抓捕机构将禽类很好的关闭在单独的笼子里,这种抓捕方式能够有效的提高安全性和劳动强度,设计出的提升机构,可增加抓捕的连续性及灵活性;该设计完成后可应用于农村散户单养、小规模山地放养及一定规模的室内养殖禽类的成禽的抓捕出售等,同时该研究可应用于大规模养殖等领域。
目录
摘要I
目录III
表目录V
图目录VI
符号及其计量单位说明VII
1.前言1
1.1背景1
1.2国内外研究现状2
2.设计方案论证3
2.1原理方案设计3
2.2原理方案4
3.方案的校验6
3.1设计的目的6
3.2设计方案的可行性分析6
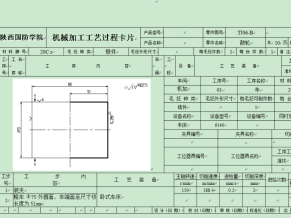
3.2.1主框架的基本尺寸的确定6
3.2.2材料的选择确定8
3.3设计的基本内容8
4.计算部分8
4.1万向轮轴径的确定8
4.2主框架支脚的受力计算10
4.3抓捕机构组件的计算10
4.3.1弹簧的计算与选用10
4.3.2磁铁的计算11
4.4提升机构中的受力计算12
5.结构设计部分12
5.1主框架的结构设计12
5.2万向轮的结构设计13
5.3磁力自控抓捕结构设计13
5.4手动提升结构设计14
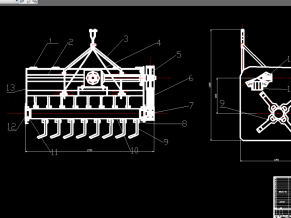
6.装配体17
7.结论18
参考文献19
致谢20

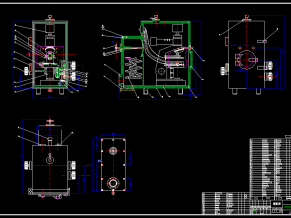
装配体A0-Model

齿轮固定板1-Model

齿轮装配体A2-Model

从动轮轴A4-Model

盖板-Model

框1-Model

框-Model

框架A1-Model

框装配体A1-Model

连接件2-Model

万向轮装配体A3-Model

主动轮轴-Model

主框架板A2-Model

自锁拨杆-Model
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!