��ά
�Ż�е�ķ�չ���ܶ�������͵��豸���㷺���õ����и�ҵ���У���������Щ���˻�е�ֺͻ�е�����ˣ�Ҳ�DZ��õ����������ۿ��Լ���е�ӹ���ҵ���ܹ�ȡ���˹�ʵ�ָ�Ч�ʵ���ҵҪ�����ŷdz��õIJ������ܣ��ر��Ƕ��ڸ��ֲ�ͬ���ӵĹ����������У����űȽϺõ���Ӧ�ԣ��������ڿ�ʯ�ͽ���������ͨ���˹������Ʒ�Ļ�������һ����Σ���ԣ����Ҷ��ڲ��ֵIJ����������Ƚϴ��˹���ҵЧ�ʷdz��ĵ͡���е�ֵ�ʹ��Ҳ�ǽ�Щ���ռ������ģ��������Ÿ�������ŵ㣬����ܵ����и�ҵ��ƫ�ã�Ŀǰ�г�������Ҳ�Ƚϴ���������ҵ��˵Ҳ��һ���ȽϺõĻ������ڹ��պ���������Ƴ�һ����������г�Ҫ�������豸���������ơ�
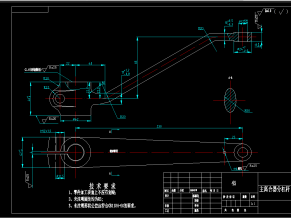
������Ƶ������ɶ�Һѹ��е�֣���Ҫ�ǽ��Ŀǰ�����ϵĸ���Һѹ��е�ֽṹ���������ڶ������ϵ�ץȡҪ�ṹ��Ҫʹ��Һѹ��������ʵ��������ɶȵĶ�������Ƶ����ǽṹ�ķ���ȷ�����Լ���Ҫ�㲿���ļ���У�ˡ�����ͨ����ͼ����������������ɶ�Һѹ��е�ֵ��㲿��������ṹ��ͼֽ��

����

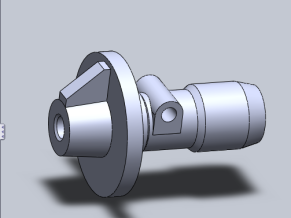
��צ

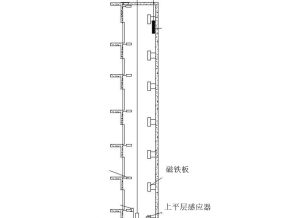
�����ɶ�Һѹ��е�ֵ���

�����ɶ�Һѹ��е��С��

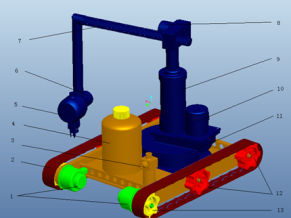
�����ɶ�Һѹ��е��������ת���������Ӱ�

���D��

��

�����

�b��D
���������������û��ϴ�������Ȩ��ԭ�������У����漰��Ȩ���⣬����������ϵ�����ǽ���ʱ������