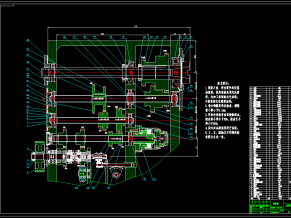
总装图
机械手是近代新兴起的高科技自动化生产设备,不过区区数十载的发展历程,就已经成为工业自动化生产中不可或缺的一部分,对生产效率的提高,产品质量的改善,和快速的市场运作有着至关重要的作用。
本次设计的机械手主要搬运小型物品,主要工作任务就是将目标物品从一个传送带搬运到另一个传送带上,实现生产加工的自动化。本次机械手的设计首先会根据目的来确定机械手的工艺流程,然后确定其自由度和坐标形式,再设计其外部结构,最后在用可编程控制器来进行编程实现对机械手的控制。
本设计选用的PLC是西门子公司S7-200PLC,其控制原理是由可编程控制器控制相应的电磁阀或者液压马达,由电磁阀控制相对应气缸来驱动执行部件完成抓取,而液压马达则带动齿轮旋转来完成机械手底座的旋转动作。有着几个动作的有序结合来实现对目标物品的搬运。

PPT

大齿轮

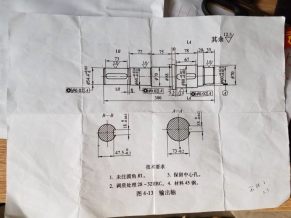
回转轴

控制图

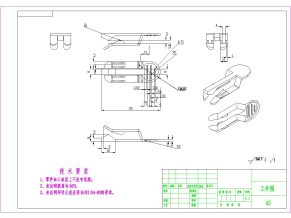
手抓

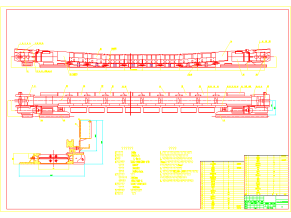
腰部结构

轴套