зАХфЭМ
ЙоЬхЬхЛ§здЖЏМьВтЛњЦїШЫЩшМЦЪЧвЛжжЖдДѓаЭСЂЪНН№ЪєЙоНјааздЖЏЛЏМьВтЕФзАжУЁЃДЋЭГЕФЙоЬхШнЛ§МьВтжївЊВЩгУЮЇГпЗЈЃЌЙтбЇШ§НЧВтСПЗЈЃЌетаЉЗНЗЈВЛНіаЇТЪЕЭЯТЃЌЖјЧвЗбЪБЗбСІЃЌВтСПЕФНсЙћШнвзЪмЕННЯЖрвђЫиЕФгАЯьЃЌЮЊСЫПЫЗўетаЉШБЕуЃЌСЂЪНН№ЪєЙоШнЛ§МьВтХРБкЛњЦїШЫЩшМЦЕФЯыЗЈОЭдкЮвЕФФдКЃжаИЁЯжЁЃ
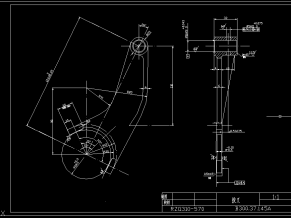
ЪзЯШЃЌИХвЊНщЩмСЫХРБкЛњЦїШЫЯрЙиСьгђКЭбаОПЯжзДМАЦфЮДРДЕФЗЂеЙЗНЯђЁЃЩшМЦСЫХРБкЛњЦїШЫЕФећЬхНсЙЙЃЌбЁдёгыЗжЮіСЫХРБкЛњЦїШЫЕФЮќИНЗНЪНЃЌВЂЧвзХжиВћЪіСЫИїжжДХТЗЕФгХШБЕуЁЃзюжеШЗЖЈХРБкЛњЦїШЫЕФЮќИНЗНЪНЮЊЗЧНгДЅЪНгРДХЮќИНЗНЪНЃЌЖдЦфЮШЖЈадгыДХЮќИНСІжЎМфЕФЙиЯЕзіГіСЫЯргІЗжЮіЁЃ
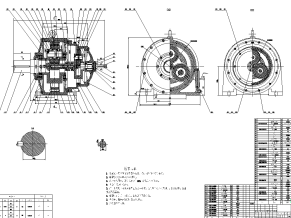
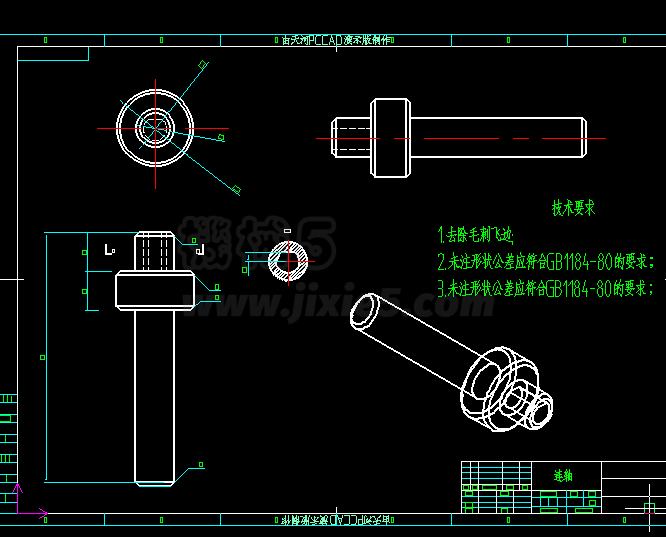
ЦфДЮЃЌОЙ§ЖдХРБкЛњЦїШЫдЫЖЏЗНЪНЕФЗжЮіЃЌШЗЖЈВЩгУЫФТжЧ§ЖЏЗНЪНзїЮЊЦфдЫЖЏЗНЪНЁЃдкЖдЕчЛњЕФЧ§ЖЏФмСІвдМАСІбЇЁЂдЫЖЏбЇзіГіЯргІЕФЗжЮіКѓЃЌНЈСЂСЫЛњЦїШЫЕФЖЏСІбЇКЭдЫЖЏбЇФЃаЭЁЃзлКЯПМТЧКѓЭъГЩСЫХРБкЛњЦїШЫБОЬхЛњаЕНсЙЙЕФећЬхЩшМЦЁЃ
дйДЮЃЌЖдХРБкЛњЦїШЫПижЦЯЕЭГЕФдЫЖЏФЃПщЁЂЧуНЧФЃПщЁЂЕчдДФЃПщЕШгВМўФЃПщзіГіЯЕЭГЕФЩшМЦКЭЫЕУїЃЌВЂИјГіСЫЯргІЕФШэМўГЬађЁЃбажЦЕФХРБкЛњЦїШЫОпгаИКдиФмСІЧПЁЂвЦЖЏЦНЮШЁЂЫйЖШПЩЕїКЭОРЦЋФмСІЧПЕШЬиЕуЃЌЦфИїЯюадФмжИБъЖМДяЕНСЫЩшМЦЕФдЄЦквЊЧѓЁЃ
зюКѓЃЌЖдЫљзїбаОПКЭжївЊЙЄзїНјаазмНсЃЌВЂЖдНёКѓЕФЙЄзїзіГіСЫеЙЭћЁЃ

ЕзАх
СЌжс
СїГЬЭМ
ФПТМ1
ФПТМ2
ЩЯЕзАх
ЮЂЕїЛњЙЙ
жЇзљ
жсГазљ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ