码垛机
码垛机是根据其结构特点和具体的工作环境要求对其进行设计的,它可代替人们繁重劳动,从而提高了生产的效率。本主要是根据码垛机器人的末端执行器工作的任务进行分析,设计出一款码垛机器人,并且给出该机器人的三维模型,并计算出该机器人的自由度和传动比,根据码垛机器人的相关数据选用合适的电机、齿轮和轴。并对相应承担扭矩的齿轮和轴进行了校核。现在的码垛机器人可用于代替人的繁重劳动以实现生产的机械化和自动化。大部分的码垛机器人都运用了堆迭法,堆迭法是一种强大的机器学习技术,通过基于交叉验证的元模型智能地结合其他方法的预测结果。

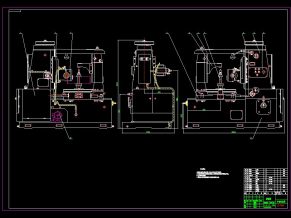
底座

底座222

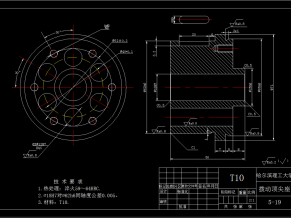
手爪

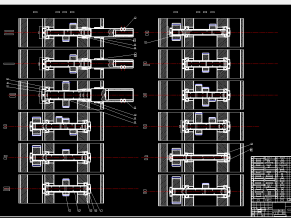
腰关节回转轴

腰座

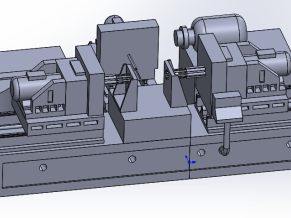
三维

三维机械手
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!