

装载机是一种应用广泛的工程机械。其工作装置的结构和性能直接影响工程机械整机的工作尺寸和性能参数,工作装置的合理性直接影响整机的工作效率、生产负荷、动力与运动特性、不同工况下的作业效果、工作循环的时间、外形尺寸和发动机功率等。由于装载机传统开发模式存在的开发周期长、过程繁杂、开发成本高、性能测试困难等问题,本文将虚拟样机技术引入装载机开发领域,完成以下工作:
1.介绍了装载机的发展历史及前景,介绍了虚拟技术产生的背景、在国内的发展状况以及虚拟技术的实际意义。
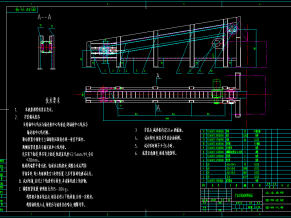
2.装载机工作装置包括铲斗,动臂,摇臂及它们相对应的油缸,连杆,并对它们进行设计计算。
3.简述了Pro/E软件在工程设计中的应用,利用Pro/E构建装载机的三维实体模型,并对其进行装配,在Pro/E环境下进行了装配干涉检验。
4.应用Pro/E软件对工作装置做动态分析,检测干涉测绘工作装置的性能参数,对其进行评价。
5.应用Pro/M模块对工作装置的关键部位进行有限元分析和优化。
装载机工作装置的作业过程大致为:动臂油缸回缩,将动臂下放至下限位置后,斗尖接触地面,开动装载机,铲斗借助机器的牵引力插入料堆;然后转斗油缸伸出,转动铲斗产取物料;等转斗油缸封闭,动臂油缸伸出,举升动臂将铲斗升到适当的位置,然后驱动装载机到达卸料点;到达卸料点后,保持转斗油缸长度不变,动臂油缸持续伸长,将铲斗举升到所需卸载高度;然后动臂油缸封锁,转斗油缸收缩翻转产斗,装载机卸料;卸料结束后,动臂油缸回缩下放动臂,实现铲斗自动放平,再次进入地面插入工况,进入下一次循环作业过程。该作业流程可简单的分解为:装→运→卸→返回。
装载机作业时工作装置应能保证:当转斗油缸闭锁、动臂油缸举升或降落时,连杆机构使铲斗上下平动或接近平动,以免铲斗倾斜而撒落物料;当动臂处于任何位置、铲斗绕动臂铰点转动进行卸料时,铲斗倾斜角不小于45°,卸料后动臂下降时又能使铲斗自动放平,保证各个杆件在运动过程中不存在干涉。保证必要的卸载角、卸载高度和卸载距离。为避免产斗中的物料撒出要求产斗作“平移运动”,即需要限制产斗口的倾角控制在15°以内为好。
装载机的工作机构属于连杆机构,设计中要特别注意防止各个工况出项机构相互干扰、“死点”、“自锁”和“机构撕裂”等现象,各处的转角不得小于10°;在满足中和工作性能的前提下,尽可能增大机构的倍力系数,减小工作机构的前悬、长度和高度,以提高装载机载各种工况下的稳定性和司机的视野。
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!



















")



