装配树
"运动控制系统是指通过控制机械系统中一根轴的运动或多根轴的运动之间的协调,使运动平台以特定的速度曲线及加减速曲线来实现各种功能的系统。传统的运动系统多采用步进电机作为驱动装置,然而步进电机的运行精度不够,且不够稳定。而目前伺服电机多用于专用的数控系统,不仅价格昂贵而且不能很好地与采用PLC作为控制的生产线进行连接。
本文介绍一种基于PLC的伺服电机运动控制系统,其通过触摸式的可编程终端与PLC相连接对运动系统进行监控和操作。系统采用OMRON的CJ系列可编程控制器和CJ1W-NC213位置控制模块作为主要的控制装置,通过控制CJ1W-NC213的位置控制模块输出指令至伺服电机驱动器,经过伺服驱动器的数据转换后输出指令脉冲控制伺服电机的转速与旋转圈数。本系统具有原点搜索、手动操作、自动操作、单点定位等多种功能。根据系统所要完成的功能选择元器件,使用SolidWorks设计运动平台、传感器遮光板、传感器座等零件的设计并绘制三维图对各个部件的连接及分布进行设计。完成机械部分的设计后,使用CX-Programmer软件对位置控制器的公共参数、轴参数、操作存储器区、存储器操作区进行设置然后根据所设置的参数进行梯形图程序设计。同时,使用CX-Designer软件对触摸屏的主界面、手动操作界面、自动操作界面及报警提示界面进行设计。通过CX-Designer软件和CX-Programmer软件相结合进行程序的仿真模拟,确保程序正确无误后进行上机调试。"

R88A-CRKA003C驱动器

程序框图

参数保存

传感器座

电控图

触摸屏2

R88D-KT01H-Z驱动器

触摸屏3

联轴器

电气原理图

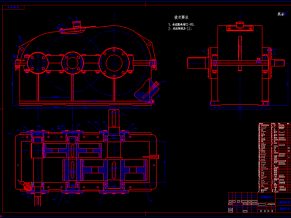
结构图

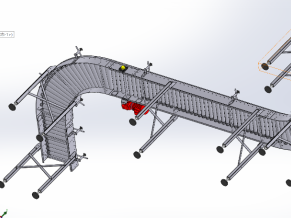
机器人模组

梯形图

移动平台

任务书

伺服驱动器

触摸屏1

电子齿轮

说明书

传感器安装

伺服中继单元

模块

伺服电机

开题报告

文献综述

驱动器各个接口连线

英文翻译

说明书内容

实验用设备机构
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!