

机械手
近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
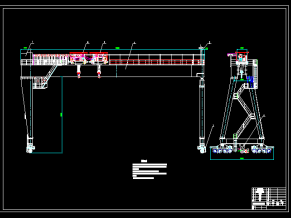
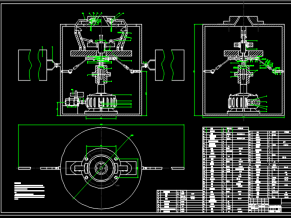
典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在生产线或加工设备旁边作业的,本在参考大量文献资料的基础上,结合项目的要求,设计了一种小型的、固定在AGV上以实现移动的六自由度串联机器人。
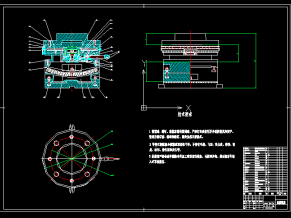
首先,针对机器人的设计要求提出了多个方案,对其进行分析比较,选择其中最优的方案进行了结构设计;同时进行了运动学分析,用D一H方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析。这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。
在Pro/E中完成6自由度机械手及其手爪的三维造型和装配,将模型导入ADAMS中,并进行运动学仿真,得到机械手各个部位的速度、加速度、角速度、角加速度在X、Y和Z方向上随时间变化的曲线图。
最后用ADAMS软件进行了机器人手臂的运动学仿真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了经验

目录

仿真

零件图

说明书


















+solidworks三维建模仿真模型及运动仿真+10张工程图)")


