三维图
我设计的是一个仿蟹机器人,俗称机械螃蟹。此机械螃蟹由一个电机驱动,完全由机械结构控制,可以实现横向爬行、行进中左右转向及原地转向,并且可以适应多种路面状况,有较强的适应性、稳定性。本文将首先对自然中螃蟹的结构以及行走方式进行分析、研究,然后提出总体的设计方案,再对机械螃蟹各个机构的具体设计方案、制作方法和solidworks软件仿真展开详细的介绍,最后对机械螃蟹做出总结、评价与比较。

完整机器人(2)

字数

足

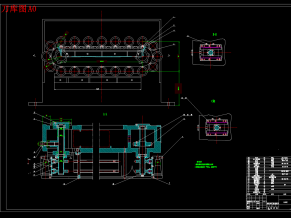
A2零件图

A3零件图

A4零件图

端板

全部文件

小臂

目录
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!