

ИэО¬ЧЬЧ°Нј
КЯІЛІ§МеГзЧФ¶ҜТЖФФ»ъЎӘЎӘИЎГзЧ°ЦГЙијЖ
ХӘТӘ
ТЖФФКЗКЯІЛЙъІъ№эіМЦРөДЦШТӘ»·ҪЪЦ®Т»Ј¬ТЖФФҫЯУР¶ФЖшәтөДІ№іҘЧчУГәНК№ЧчОпЙъУэМбФзөДЧЫәПР§ТжЈ¬ҝЙТФід·ЦАыУГ№вИИЧКФҙЈ¬ЖдҫӯјГР§ТжәНЙз»бР§Тжҫщ·ЗіЈҝЙ№ЫЎЈДҝЗ°Ј¬№ъДЪХэФЪУҰУГөДТЖФФ»ъРө¶аОӘ°лЧФ¶ҜТЖЦІ»ъЈ¬°лЧФ¶ҜТЖФФ»ъҝҝКЦ№ӨЛНГзЈ¬Р§ВКөНЈ¬АН¶ҜЗҝ¶Иҙ󣬶ш№ъДЪЧФ¶ҜТЖФФ»ъөДСРҫҝёХёХЖрІҪЈ¬ЧФ¶ҜТЖФФ»ъҙУИЎГзөҪЦІГз¶јУЙ»ъРөЧФ¶ҜНкіЙЈ¬Р§ВКёЯЎЈ№ъНвЛдУРТ»Р©ЧФ¶ҜТЖФФ»ъУҰУГУЪЙъІъЈ¬ө«»№ҙҰУЪІ»¶ПСРҫҝУлНЖ№гҪЧ¶ОЎЈ¶шИЎГз»ъ№№КЗЦЖФјЧФ¶ҜТЖФФ»ъ·ўХ№өДЎ°ЖҝҫұЎұЈ¬ТІКЗЦЖФјКЯІЛҙу№жДЈЦЦЦІөД№ШјьОКМвЦ®Т»ЎЈТтҙЛЙијЖТ»ЦЦРВРНөДИЎГз»ъ№№МжҙъКЦ№ӨИЎГзЈ¬ТСіЙОӘОТ№ъКЯІЛЦЦЦІТө·ўХ№өДЖИЗРРиТӘЎЈ
ұҫОДЧЬҪбОьКХБЛ№ъДЪНвёчЦЦИЎГз»ъ№№өДУЕИұөгЈ¬ФЪКөСйКТТСУРСРҫҝіЙ№ыөД»щҙЎЙПЈ¬ЙијЖБЛТ»ЦЦРВРНКЯІЛІ§ГзИЎГз»ъ№№Ј¬ёГ»ъ№№ҝЙТФөҘ¶АЧчОӘИЎГз»ъ№№Ј¬КөПЦЧФ¶ҜИЎГзЈ»»тНЁ№эёДҪшІҝ·ЦҪб№№ІОКэЈ¬ҝЙТФјҜФФИЎ№ҰДЬУЪТ»МеЈ¬јҙИЎГзәНФФЦІГз¶ҜЧч¶јУЙёГМЧ»ъ№№НкіЙЎЈёГКЯІЛІ§ГзИЎГз»ъ№№Ҫб№№јтөҘЈ¬№ӨЧчҝЙҝҝЈ¬ИЎГзР§ВКёЯЎЈұҫОДЦчТӘөДСРҫҝДЪИЭИзПВЈә
1.ёщҫЭКЯІЛІ§ГзИЎГзөДјјКхМШөгәНЕ©ТХТӘЗуЈ¬ДЈДвИЛ№ӨИЎГзөД№мјЈЎў¶ҜЧчәНЧЛМ¬ТӘЗуЈ¬·ўГчКЯІЛІ§ГзИЎГз»ъ№№Ј¬ВъЧг»ъРөИЎГзМШКвөД№ӨЧч№мјЈТӘЗуЈ¬ұИПЦУРөДКЯІЛИЎГз»ъ№№№ӨЧчР§ВКёЯЈ¬ІўЗТ№ӨЧчЖҪОИЎЈ
2.ВЫКцБЛёГИЎГз»ъ№№өД№ӨЧчФӯАнәНҪб№№МШөгЈ¬ҪЁБўИЎГз»ъ№№өДФЛ¶ҜС§ДЈРНЎЈ
3.ТФҪЁБўөДФЛ¶ҜС§ДЈРНОӘ»щҙЎЈ¬»щУЪҝЙКУ»ҜҝӘ·ўЖҪМЁVB6.0Ј¬НЁ№эЖдИнјю·ЦОцКЯІЛІ§ГзИЎГз»ъ№№ёЁЦъ·ЦОцУлУЕ»ҜИнјюЈЁИнјюөЗјЗәЕЈә2011SR030044Ј©Ј¬ҪйЙЬБЛёГИнјюөДИЛ»ъҪ»»ҘҪзГжј°№ҰДЬЈ¬»щУЪёГИнјюЈ¬ҪвҫцБЛёГ»ъ№№ФЛ¶ҜС§¶аДҝұкУЕ»ҜөДДСөгЎЈ
4.ёщҫЭКЯІЛИЎГзЕ©ТХТӘЗуЈ¬МбіцКЯІЛІ§ГзИЎГз»ъ№№ІОКэУЕ»ҜөДДҝұкәНУЕ»Ҝ·Ҫ·ЁЈ¬·ЦОцёчІОКэұд»Ҝ¶ФИЎГз»ъ№№ФЛ¶ҜМШРФөДУ°ПмЈ¬АыУГЧФЦчҝӘ·ўИнјюЈ¬ІЙУГИЛ»ъҪ»»ҘөДУЕ»Ҝ·Ҫ·ЁЈ¬УЕ»ҜіцИЎГз»ъ№№өДҪб№№ІОКэЈ¬ВъЧгКЯІЛІ§ГзИЎГзөД№ӨЧчТӘЗуЎЈ
5.°ҙХХУЕ»ҜөГөҪөДҪб№№ІОКэЈ¬ҪшРРКЯІЛІ§ГзИЎГз»ъ№№өДЧЬМеЙијЖЈ¬МЦВЫБЛЙијЖЦРУҰёГЧўТвөДОКМвЈ¬ЧоәуФЪProEЎўCADПВНкіЙЧ°ЕдНјәНёчБгјюөДЙијЖЎЈ
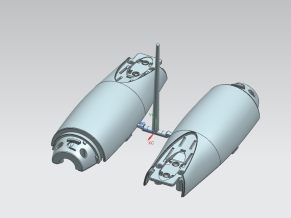
6.ҪЁБўИЎГз»ъ№№өДИэО¬КөМеДЈРНЈ¬¶ФЖдҪшРРРйДвЧ°ЕдЎЈ
№ШјьҙКЈәКЯІЛІ§ГзЈ»ИЎГз»ъ№№Ј»№ӨЧч»ъАнЈ»ІОКэУЕ»ҜЈ»КФСйСРҫҝ
Optimal and Design of Vegetable Plug Seedling Pick-up Mechanism of Planetary Gear Trainwith Ellipse Gears and Incomplete Non-circular Gear
Abstract
Transplanting is an important process ofvegetable procreating,which has the function of compensatingvarying climate and shifting the procreating of plants to an earlier time. It helps the plants to use the source of light and temperature sufficiently,whichwill make considerable economical and social benefits. At present, most transplanting machines are semi-automatic transplanting machinesЈ¬they need pick up plug seedling by manЈ¬which have highwork intensity and lowwork efficiency,and domestic research on automatic transplanting machine is just beginning. Automatic transplanting machine can pick up plug seedling and transplanting plug seedling by themselves,which have lowwork intensity and highwork efficiency. The overseas have automatic transplanting machine be applied in production,but the application and research on automatic transplanting machine is developing.Thus the pick up plug seedling machine is the key issues,which restricted the development of automatic transplanting machine and at same time,which is also restricted the development of the plants ofvegetable. So it's a pressing requirement to design a new kind of pick up plug seedling machine.
This paper concludes the merits and demerits of several kinds of transplanting machines from both domestic and abroad. Based on the achieved research result, a newvegetable plug seedling pick-up mechanism of planetary gear trainwith ellipse gears and incomplete non-circular gear has been designed. Thisvegetable plug seedling pick-up can be used as seedling fetching mechanism lonely to realize fetching seedlings automatically. Besides, if the mechanism parameters of this mechanism have been optimized properly, the motion of fetching seedlings and transplanting seedlings can both be realized by this mechanism. Thisvegetable plug seedling pick-up mechanism has simple structure and reliable performance. The main content of this paper is listed as bellow:
1. According to the technological characteristics and agricultural requirements, imitate the requirements of trajectory, motion and attitude of manual pick up plug seedling, invent thevegetable plug seedling pick-up mechanism,which can satisfy the specialworking trajectory requirements of fetching and pick up plug seedlings automatically. This newvegetable plug seedling pick-up mechanism has higherworking efficiency, steadier transmission and lessvibration than existing mechanism.
2. Theworking principle and structural features of this automaticvegetable plug seedling pick-up mechanism has been discussed and the kinematic mathematical model of this mechanism has been established.
3.Based on the established kinematic mathematical model and Visual Basic 6.0, develop the kinematic aided analytical and optimal software of thisvegetable plug seedling pick-up mechanism(Register Number: 2011SR030044). Introduce the human-computer interactive interface and functions of this software. By this software, the difficulty of optimizationwith multiple kinematic objects of this mechanism can be solved.
4. According to the agricultural requirements in our country, put forward the parametric optimal objects and methods of thevegetable plug seedling pick-up mechanism. Analyze the influence of parametervitiation on kinematic characteristics of thisvegetable plug seedling pick-up mechanism. Take advantage of the developed software, use the optimization method of human-computer interactive, and obtain the structural parameterswhich can satisfy theworking requirements of automaticvegetable pot seedling transplanting.
5. In accordancewith the obtained structural parameters, design the ensemble of thevegetable plug seedling pick-up mechanism; discuss the problemswhich should be noticed in the process of designing. Finally finish the design of parts and the assembly drawing basing on ProE and CAD.
6. Establish the solid model of all parts of thisvegetable plug seedling pick-up mechanism in UG6.0 and then carry out thevirtual assemble.
Keywords: Vegetable plug seedling; Pick-up mechanism; Work principle; Parameters optimization; Test study
ДҝВј
Abstract 6
өЪ1ХВРчВЫ9
1.1З°СФ9
1.2№ъДЪНвКЯІЛІ§ГзИЎГз»ъ№№өД·ўХ№ёЕКц11
1.2.1ОТ№ъКЯІЛІ§ГзТЖФФ»ъРө»Ҝ·ўХ№ёЕҝц11
1.2.2ОТ№ъКЯІЛІ§ГзТЖФФ»ъҙжФЪөДОКМв12
1.2.3ОТ№ъКЯІЛІ§ГзТЖФФ»ъҙжФЪОКМвҪвҫцНҫҫ¶·ЦОц12
1.2.4№ъНвКЯІЛІ§ГзЧФ¶ҜТЖФФ»ъөД·ўХ№әНСРҫҝіЙ№ы13
1.2.5КЯІЛІ§ГзТЖФФ»ъ·ўХ№·ҪПт14
1.3№ъДЪИЎГз»ъ№№ҙжФЪөДЦчТӘОКМвәН·ўХ№·ҪПт15
1.3.1№ъДЪИЎГз»ъ№№·ўХ№ҙжФЪөДЦчТӘОКМв15
1.3.2№ъДЪКЯІЛИЎГз»ъ№№өД·ўХ№·ҪПт15
1.4ұҫОДөДСРҫҝДҝұк16
1.5ұҫОДөДЦчТӘ№ӨЧчј°ДЪИЭ°ІЕЕ17
1.6ұҫХВРЎҪб17
өЪ2ХВКЯІЛІ§ГзИЎГз»ъ№№өДФЛ¶ҜС§·ЦОц18
2.1ИЎГзЧҰ№ӨЧчТӘЗуөДКөПЦ18
2.2КЯІЛІ§ГзИЎГз»ъРөКЦөД»ъ№№ЧйіЙУл№ӨЧчФӯАн19
2.3НЦФІіЭВЦҙ«¶ҜөДФЛ¶Ҝ·ЦОц21
2.3.1НЦФІіЭВЦөДДцәПМШРФј°УЕөг21
2.3.2НЦФІіЭВЦөДҪЗО»ТЖЎўҪЗЛЩ¶ИәНҙ«¶ҜұИ·ЦОц22
2.4КЯІЛІ§ГзИЎГз»ъРөКЦФЛ¶ҜС§ДЈРНөДҪЁБў24
2.4.1ФЛ¶ҜС§·ЦОц·ыәПөДЛөГч24
2.4.2КЯІЛІ§ГзИЎГз»ъРөКЦО»ТЖ·ЦОц25
2.4.3»ъРөКЦЙПёчөгО»ТЖ·ҪіМәНёч№№јюҪЗО»ТЖ·ҪіМ26
2.4.4»ъ№№ЙПёчөгөДЛЩ¶И·ҪіМәНёч№№јюҪЗЛЩ¶И·ҪіМ28
2.4.5»ъРөКЦЙПёчөгөДјУ¶И·ҪіМәНёч№№јюҪЗјУЛЩ¶И·ҪіМ29
2.5ұҫХВРЎҪб31
өЪ3ХВКЯІЛІ§МеГзЧФ¶ҜТЖФФ»ъИЎГз»ъ№№өДІОКэУЕ»Ҝ32
3.1УЕ»ҜДҝұкУлұдБҝ32
3.2ёЁЦъ·ЦОцУЕ»ҜИнјю32
3.2.1ИЛ»ъҪ»»ҘјтҪй33
3.2.2ұҫҝОМвИЛ»ъҪ»»ҘИнјюҪйЙЬ34
3.2.3НЦФІіЭВЦІОКэјЖЛг35
3.2.4ИЎГз»ъ№№ІОКэУЕ»ҜІҪЦи35
3.2.5ИЎГзЧҰјвөгөДЛЩ¶И·ЦОц36
3.3ұҫХВРЎҪб38
өЪ4ХВКЯІЛІ§ГзЧФ¶ҜТЖФФ»ъИЎГз»ъ№№өДҪб№№ЙијЖ38
4.1КЯІЛІ§МеЧФ¶ҜТЖФФ»ъИЎГз»ъ№№өДХыМеҪб№№ЙијЖ38
4.2ИЎГзұЫ»ъ№№ЙијЖ40
4.3 CADИнјюҪйЙЬ41
4.3.1 CAD¶юО¬ИЎГз»ъ№№БгјюНј41
4.4 ProeИнјюҪйЙЬ43
4.4.1ИэО¬ProeИЎГз»ъ№№БгјюНј44
4.5ЧЬЧ°ЕдНј45
4.6ұҫХВРЎҪб46
өЪ5ХВЧЬҪбУлХ№Ны47
5.1ЧЬҪб47
5.2ҪшТ»ІҪөДХ№Ны48
ЦВР»49
ІОҝјОДПЧ50
ёҪВј52

AЧЬЧ°Нј

LУТПдМе

LЧуПдМе

ІҰІжЈЁПыіэіЭП¶Ј©

ІҰІжГұЈЁПыіэіЭП¶Ј©

ІҰІжЦб

өҜ»ЙЈЁПыіэіЭП¶Ј©

¶ЁО»°е(РРРЗЦб)

РРРДЦбЛшЧЎПъ

РРРЗВЦ

РРРЗЦб

РРРЗЦб-07

РРРЗЦбМЧНІ

ЙијЖДҝВј

ЙијЖЛщ°ьә¬ОДјю

М«СфВЦ

М«СфВЦМЧНІ

Н№ВЦЈЁПыіэіЭП¶Ј©

Н№ВЦ

Н№ВЦіДМЧ

САЗ¶КҪ·ЁАј

ХӘТӘІҝ·Ц

ЦРјдВЦ

ЦРјдЦб

ЦРјдЦб¶ЁО»Пъ

ЦРјдЦбМЧНІ1

ЦРјдЦбМЧНІ2

ЧЦКэНіјЖ
ЙкГчЈәДЪИЭАҙЧФУГ»§ЙПҙ«Ј¬ЦшЧчИЁ№йФӯЧчХЯЛщУРЈ¬ИзЙжј°ЗЦИЁОКМвЈ¬ЗлУлОТГЗБӘПөЈ¬ОТГЗҪ«ј°КұҙҰАнЈЎ




















")



