

装配图A0
随着5G技术的日趋成熟,无人驾驶有了更加有力的技术支持。无人驾驶技术是未来几十年汽车和科技公司的一个重要研究方向,避障技术是无人驾驶技术中最基储最核心的一项技术,具有广阔的发展前景。
本的设计内容为设计一辆基于Arduino的超声波避障小车,本设计将基于Arduino单片机作为控制中心,使用超声波传感器和红外寻迹传感器来获取环境信息,使用舵机来转动超声波传感器,使用L298N模块作为电机驱动模块驱动四轮小车,解决了小车绕过障碍物后返回原路线的难题,实现了设计要求。
经过实验验证,本文所设计的小车能够检测障碍物并进行避障,并能够在避障后按照原路线进行行驶。达到了预期的目标和要求。
关键词Arduino超声波避障小车

超声波支架A4

车板A3

电池盒A4

电机螺柱A4

电机支架A4

舵机A4

舵机螺母A4

舵机螺柱A4

舵机支架A4

红外寻迹A4

开关A4

连接排针A4

六角螺柱(红外)A4

六角螺柱A4

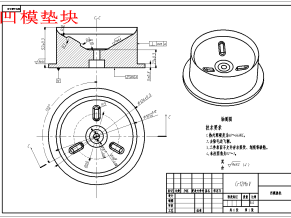
轮毂A3

轮胎A4

螺母A4

螺柱A4

马达A4

面包板A4

目录字数

18650电池A4

超声波A4

超声波舵机螺钉A4

超声波螺母A4

超声波螺柱A4

全部文件




















")
")
")
