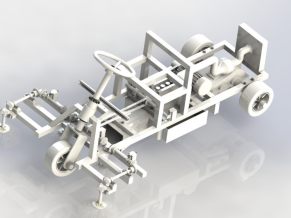
装配图
本文设计一种料袋码垛机械手的机械臂,该机械手通过底座固定在混凝土地面之上,其中底盘能够实现360度旋转,旋转机构主要是通过蜗轮蜗杆减速器实现减速并旋转,该机构能够实现自锁,当电机停止转动后能够实现位置的锁定,无需电机抱闸制动。旋转作业通过电机驱动一个拉杆实现,拉杆的强度相对较高通过铸铁加工成本较低,经济性较好。通过减速电机驱动齿轮,小齿轮与大齿轮啮合实现旋转。末端的抓取机构主要是通过气缸的伸缩实现抓取,采用气缸能够实现抓手的快速位移,保证高效的工作效率。进而设计出一种工作效率高、作业范围大、工作性能稳定的料袋码垛机器人臂部结构。

三维图

大手臂摆线减速机安装法兰

连接轴

驱动臂底座

蜗轮轴