机械总图
随着科技的进步,机器人已经日趋广泛应用于工业生产和日常生活中。随着经济的增长,城镇中随之矗立起无数电线杆、路灯杆、大桥斜拉钢索等高层建筑。长期以来怎样绿色环保、高效、低成本的解决这些集实用性与美观性一体的杆状城市建筑的清洗、维护问题,一直是环保工作者们研究的一个课题。
本文针对上述市政工程中需要大量爬杆作业的需求,研制出一种基于气动元件的爬杆机器人,该机器人有一定的载重能力,可广泛替代人工应用到市政爬杆作业中。在比较几类爬行机构的优劣的基础上,确定了机器人本体的大致结构,采用气动元件实现机器人的爬升运动,电机带动双向螺旋机构运动进行机器人手臂的夹紧。随后根据路灯杆的尺寸数据,设计估算出机器人的各零部件的尺寸与质量,据此,确定气缸和电机的型号。最后,对各个元件进行校核验算,设计出爬杆机器人。
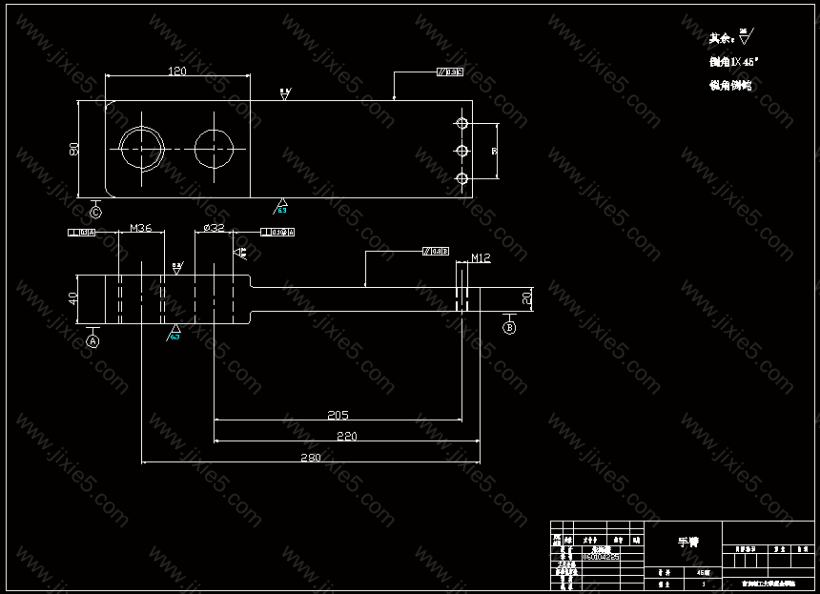
手臂
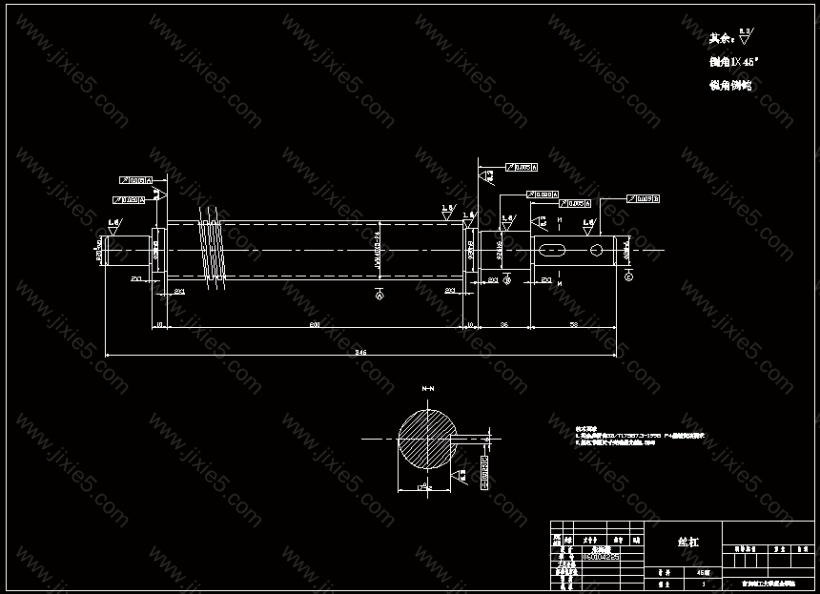
丝杠

大齿轮