

车箱
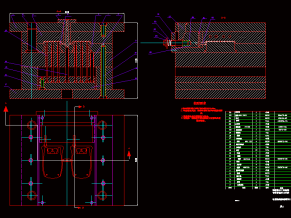
有轨装车机机行走机构设计分析(含CAD图纸及三维图)
摘要
有轨装车机机有轨行走机构具有良好的运动性能,在室内环境中可以上下楼梯,跨越台阶,在室外非结构地形中可以、跨越壕沟、自适应路面。通过加载不同的设备和仪器,机器人可广泛用于救援、抢险、防爆、科考、军事等领域,其应用价值十分巨大。
目录
摘要II
Abstract IV
目录V
第1章绪论1
第2章有轨行走总体方案确定3
2.1有轨行走装置工作原理3
2.2有轨行走总体设计3
2.2.1有轨行走方案4
2.2.2有轨行走的整机结构及选择6
2.2.3有轨行走的工作流程7
第3章有轨行走结构设计9
3.1有轨行走原理10
3.2有轨行走类型选择11
第4章传动件的选择12
4.1整机承载计算13
4.1.1轴承的选择14
4.1.2撑支架强度计算16
4.2销轴的设计计算18
4.2.1轴的材料选择19
4.2.2轴的最小直径确定20
4.2.3轴的结构设计22
4.2.4轴的校核23
第5章有限元分析12
5.1有限元简介13
5.1.1力学分析简介14
5.1.2动力学分析简介16
5.2机构承载分析22
5.2.1前处理23
5.2.2网格划分24
5.2.3边况设定25
5.2.4分析结果26
5.3动力学分析27
致谢28

吊耳

轮子

轮子支架

轮子轴销

越障机

支架1

支架2












")
")

")

")
")
")
")
")