

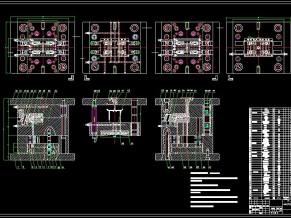
机器人装配图
隧道清洁机械手设计(全套设计及CAD图纸)
隧道清洁机器人是一种典型的机电一体化产品,隧道清洁机器人是隧道清洁机器人研究领域的热点。研究隧道清洁机器人需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
本文对一种使用在隧道清洁机器人的结构进行设计,并完成总装配图和零件图的绘制。要求对隧道清洁机器人模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
目录
1绪论1
1.1引言1
1.2隧道清洁机器人研究概况2
1.2.1国外研究现状2
1.2.2国内研究现状3
1.3总体结构组成及各部分关系简介4
1.4主要内容5
2总体方案设计5
2.1隧道清洁机器人工程概述5
2.2工业隧道清洁机器人总体设计方案论述6
2.3隧道清洁机器人机械传动原理7
2.4隧道清洁机器人总体方案设计8
2.5本章小结10
3隧道清洁机器人各部件设计及计算10
3.1隧道清洁机器人的组成10
3.2清洁隧道清洁机器人末端执行器轨迹的规划12
3.3隧道清洁机器人手腕回转中心12
3.4四连杆机构设计15
3.4.1确定设计变量21
3.4.2建立目标函数21
3.4.3确定约束条件22
3.4.4写出优化数学模型24
3.5电机的选型及计算24
3.6齿轮齿条的设计计算27
3.7小齿轮的强度计算31
3.7.1.齿面接触疲劳强度计算31
3.7.2齿轮齿跟弯曲疲劳强度计算34
3.8带传动设计计算35
3.8.1带传动设计35
3.8.2选择带型36
3.8.3确定带轮的基准直径并验证带速36
3.8.4确定中心距离、带的基准长度并验算小轮包角37
3.8.5确定带的根数z 38
3.8.6确定带轮的结构和尺寸38
3.8.7确定带的张紧装置38
3.8.8计算压轴力38
3.9带轮2上键的选择与校核48
3.9.1键的选择48
3.9.2键的校核48
总结与展望50
致谢51
参考文献52

CAD图纸集合

带轮1

带轮2

地铁隧道清洁机械手

套筒

轴

轴承座
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!









")
")
")
")
")
")
")

")
")