

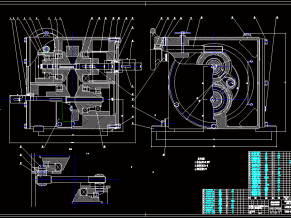
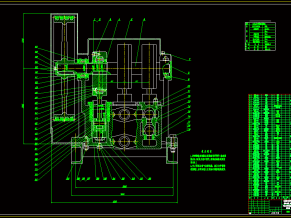
A0-自动墙壁清洗机装配图
(全套)自动墙壁清洗机设计(含全套cad图纸)
综观目前市面上可见的洗墙机,清洗方式主要还是以人工清洗为主,所以都是以挂笼垂降,再以人工方式清洗墙面;然而垂挂以及挂笼的升降方式便较具变化。传统的是人手清洁,用绳把人系住和定位,逐层清洁。这种方式人在半空吊来吊去的(好象攀崖运动员下山时那样),劳动强度高,效率低,因为主体是人,所以带有一定的危险性。
现代的机器人清洁,现代科技的发展,机器人代替人手工作是必然的趋势,在国外和我国的一些清洁公司已经采用了机器人来进行高楼外墙的清洁工作,但是这些机器人构造复杂,操作复杂,功能繁多(有些功能是很少用到或在某些场合不会用到),造成成本高(如果是一些由人工智能的机器人就更加不用说了)和资源浪费的现象。针对这个问题,我们设计了一个操作简单,经济实用的高楼外墙清洁机器。
目录
1引言1
1.1清洗建筑表面的意义1
1.2目的和现实意义1
1.3研究现状2
2方案评价与选择3
2.1高楼外墙清洁机的结构和工作3
2.1.1设置于顶楼的支撑突梁3
2.1.2支撑缆绳4
2.1.3乘载用挂笼4
2.1.4动作马达4
2.1.5升降结构5
2.1.6清洗刷5
2.2方案评价与选择5
3运动学及结构方案的确定6
3.1运动学参数选定6
3.2计算总传动比和分配各级传动比8
3.3计算传动装置运动和动力参数8
4传动零件的设计计算10
4.1第一级齿轮传动设计计算10
4.1.1.初步计算10
4.1.2校核计算10
4.2第二级齿轮传动设计计算14
4.2.1.初步计算14
4.2.2校核计算14
4.2.3确定传动主要尺寸16
4.3画简图18
4.3.1初估轴径18
4.3.2初选联轴器19
4.3.3初选轴承19
5轴的校核计算20
5.1高速轴受力分析20
5.2中间轴校核计算20
6高速轴轴承验算28
致谢30
参考文献31
附录31
附录1外文文献翻译
附录2外文文献原文
附录3自动墙臂清洗机装配图A0
附录4自动墙臂清洗机零件图1 A1
附录5自动墙臂清洗机零件图2 A1
附录6自动墙臂清洗机零件图3 A3

A1-自动墙壁清洗机零件图1

A1-自动墙壁清洗机零件图2

A3-自动墙壁清洗机零件图3















全自动立式过滤机的设计(含cad图纸)")
超声波清洗机(含cad图纸)")
")
")
")
")
")
齐全(含CAD图纸)")
")
")