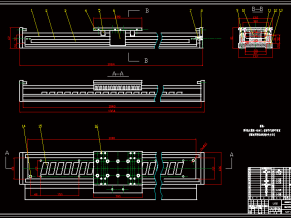
总装配图2
(含CAD图)机器人工业机器人
在加速科技进步中,机械制造业的发展起着关键的作用,其任务是在工业生产中迅速将工艺装备的独立单元变为自动化综合体(自动化工段,生产线和自动化车间),将来甚至实现自动化工厂。这种自动化生产最重要的特点是具有柔性,它能预料到,在节省劳力(或无人)情况下,根据工艺条件调整装配,以适应多种产品生产。
当代柔性自动化生产的建立和广泛应用,取决于作为科技进步的催化剂的机床制造、机器人技术、计算机技术、微电子技术、仪器制造等技术的加速发展。工业机器人是多品种的经常更换产品的生产过程自动化的通用手段。在机械制造中,工业机器人既有效地用于柔性生产系统组成工艺装备的基本工序中,也有效地用于辅助操作中。工业机器人与传统自动化手段不同之处,首先在于它在各种生产功能上的通用性和重新调整的柔性。在柔性生产系统中,工业机器人广泛应用于数控机床、锻压机床、铸造机械和仓储设备上,以完成传送装备和其它操作。工业机器人和基本工艺装备、辅助手段以及控制装置一起形成各种不同形式的机器人技术综合体柔性生产系统基本结构模块。
随着工业技术和经济的惊人发展,标志着多品种中、小批量生产最新水平的FMS(柔性制造系统),FA(工厂自动化)技术更加引人注目;作为FMS、FA技术重要组成之一的工业机器人技术也将得到迅速发展。应用工业机器人是提高生产过程自动化,改善劳动环境条件,提高产品质量和生产效率手段之一。
本次设计是根据对工业六自由度机器人的总体结构及传动系统的分析和探讨,进行三自由度工业机器人的结构设计。关键在于三轴(臂)的传动系统的设计以及整体的结构设计,避免运动的干涉。但在本次设计中出于公司的要求,我主要负责第一臂与底座的结构设计,在设计中赵勇彪老师给予了很大的指导和帮助,在此谨致谢意。
目录
摘要---------------------------------------------------------Ⅰ
引言--------------------------------------------------------------------1
第一章概述-----------------------------------------------------------2
1.1工业机器人的含义及技术概述---------------------------------- 2
1.2工业机器人的组成---------------------------------------- 2
1.3工业机器人的现状及国内外发展趋势---------------------------3
1.4设计的任务要求-------------------------------------------4
第二章机器人的结构分析-------------------------------------------5
2.1总体结构的概述-------------------------------------------------5
2.2第一轴(大臂)的结构---------------------------------------6
2.3传动方案的确定-------------------------------------------7
第三章设计计算----------------------------------------------------9
第四章传动结构的设计计算--------------------------------------11
4.1第一轴的传动结构设计--------------------------------------------11
4.2轴承的选择--------------------------------------------------26
第五章机器人各零部件的结构设计-----------------------------28
5.1转角范围的控制设计---------------------------------------------------------------28
5.2主要零部件的结构设计(第一臂与底座)-------------------------------------29
总结--------------------------------------------------------30
致谢------------------------------------------------------- 31
参考文献---------------------------------------------------32

大臂

底座

斜齿轮1

斜齿轮2

斜齿轮11dwg

斜齿轮20dwg

斜齿轮轴1