

зАХфЭМ
(ШЋЬзДјЭМ)Ш§ЮЌЪ§ПиЮ§ЫПЕуКИЛњНсЙЙЩшМЦ((КЌШЋЬзCADЭМжН)
еЊвЊ
ЫцзХЙЄвЕздЖЏЛЏЗЂеЙЕФашвЊЃЌЛњаЕЪждкЙЄвЕгІгУжадНРДдНживЊЁЃЮФеТжївЊа№ЪіСЫЛњаЕЪжЕФЩшМЦМЦЫуЙ§ГЬЁЃ
ЪзЯШЃЌБОЮФНщЩмЛњаЕЪжЕФзїгУЃЌЛњаЕЪжЕФзщГЩКЭЗжРрЃЌЫЕУїСЫздгЩЖШКЭЛњаЕЪжећЬхзљБъЕФаЮЪНЁЃЭЌЪБЃЌБОЮФИјГіСЫзЂЫмЛњзЈгУЛњаЕЪжЕФжївЊадФмЙцИёВЮСПЁЃ
ЮФеТжаНщЩмСЫзЂЫмЛњзЈгУЛњаЕЪжЕФЩшМЦРэТлгыЗНЗЈЁЃШЋУцЯъОЁЕФЬжТлСЫзЂЫмЛњзЈгУЛњаЕЪжЕШжївЊВПМўЕФНсЙЙЩшМЦЁЃ
ФПТМ
Ек1еТаїТл7
1.1в§бд7
1.2зЂЫмЛњзЈгУЛњаЕЪжЕФКЌвх7
1.3бЁЬтБГОАгывтвх7
1.4зЂЫмЛњзЈгУЛњаЕЪжЕФзщГЩ9
1.5зЂЫмЛњзЈгУЛњаЕЪжЕФЗЂеЙМАЙњФкЭтЗЂеЙЧїЪЦ9
Ек2еТзЂЫмЛњзЈгУЛњаЕЪжЕФЩшМЦЗНАИ12
2.1ЛњаЕЪжЕФЩшМЦЗНЗЈ12
2.1.1ЛњаЕЪжЕФбЁдёгыЗжЮі12
2.1.2жБНЧзјБъЛњЦїШЫЕФЩшМЦЗНЗЈ12
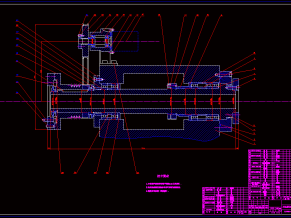
2.2ЛњаЕЪжЕФНсЙЙЩшМЦ17
2.2.1ЛњЦїШЫЕФзмЬхЩшМЦ17
2.2.2ЛњаЕЪжЕФДЋЖЏВПМўЩшМЦ17
2.2.3ЛњаЕЪжЕФБлВПЩшМЦ18
2.3зЂЫмЛњзЈгУЛњаЕЪжЕФЩшМЦЛњЙЙЕФЬиЕу19
Ек3еТзЂЫмЛњзЈгУЛњаЕЪжЕФдЫЖЏЯЕЭГЗжЮі19
3.1зЂЫмЛњзЈгУЛњаЕЪжЕФдЫЖЏЯЕЭГЗжЮі19
3.2ЛњЦїШЫЕФЧ§ЖЏЗНЪН20
Ек4еТжївЊДЋЖЏЩшМЦМЦЫу21
4.1ШЗЖЈЯЕЭГТіГхЕБСП21
4.2жиСПГѕВНЙРЫу21
4.3ЙіжщЫПИмМЦЫуЁЂбЁдё22
4.4ЫХЗўЕчЛњЙпадИКдиЕФМЦЫу25
4.5ЫХЗўЕчЛњЕФбЁгУ26
Ек5еТзЂЫмЛњзЈгУЛњаЕЪжЕФЩшМЦСуМўЕФЩшМЦ28
5.1ЫХЗўЕчЛњЕФбЁдё28
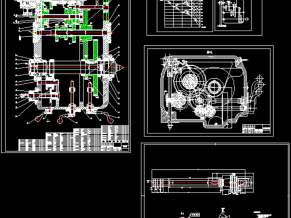
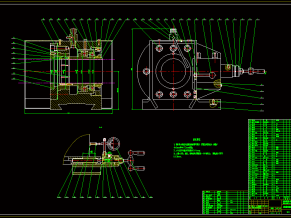
5.2ЭЌВНДјЕФЩшМЦ30
5.2.1ЭЌВНДјМЦЫубЁаЭ33
5.2.2ЭЌВНДјЕФжївЊВЮЪ§ЃЈНсЙЙВПЗжЃЉ 35
5.2.3ЭЌВНДјЕФЩшМЦ37
5.2.4ЭЌВНДјТжЕФЩшМЦ37
5.3ЕМЙьЕФбЁдё38
НсТл40
жТаЛ41
ВЮПМЮФЯз42

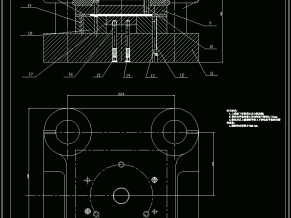
ЙіжщЫПИм

ЕїећЕцЦЌ

жсГазљ

жсГабЙИЧ

ЙіжщТнФИзљ

ЙіжщЫПИмТнФИ

ЕчЛњЫПИмСЌНгЬз
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ










Ъ§ПиСњУХШ§ЧЙHаЭИжздЖЏЛ№бцЧаИюЛњЩшМЦ(КЌCADЭМжН)")
Ъ§ПиЛњДВжїДЋЖЏЯЕЭГЩшМЦ(КЌCADЭМжН)")
Ъ§ПиГЕДВжїжсПЈХЬвКбЙзАжУЩшМЦ(КЌCADЭМжН)")
ІЕ630MMЕФЪ§ПиГЕДВзмЬхЩшМЦМАСљНЧЛизЊЕЖМмЩшМЦ---(КЌCADЭМжН)")
ІЕ600MMЕФЪ§ПиГЕДВзмЬхЩшМЦМАзнЯђНјИјЩшМЦ(КЌCADЭМжН)")
ІЕ600MMЕФЪ§ПиГЕДВзмЬхЩшМЦМАвКбЙЮВзљЩшМЦ(КЌCADЭМжН)")
ІЕ600MMЕФЪ§ПиГЕДВзмЬхЩшМЦМАКсЯђНјИјЩшМЦ(КЌCADЭМжН)")
ІЕ550MMЪ§ПиГЕДВзмЬхЩшМЦМАКсЯђНјИјЩшМЦ(КЌCADЭМжН)")
ІЕ550MMЕФЪ§ПиГЕДВзмЬхЩшМЦМАзнЯђНјИјЩшМЦ(КЌCADЭМжН)")
ІЕ550MMЕФЪ§ПиГЕДВзмЬхЩшМЦМАвКбЙЮВзљЩшМЦ(КЌCADЭМжН)")