
刚柔并联下肢康复机器人结构设计(含有CAD图纸)
摘要
本次设计是对刚柔混联下肢康复机器人装置的设计。在这里主要包括:滚珠丝杠传动系统的设计、这次设计对设计工作的基本技能的训练,提高了分析和解决工程技术问题的能力,并为进行一般机械的设计创造了一定条件。
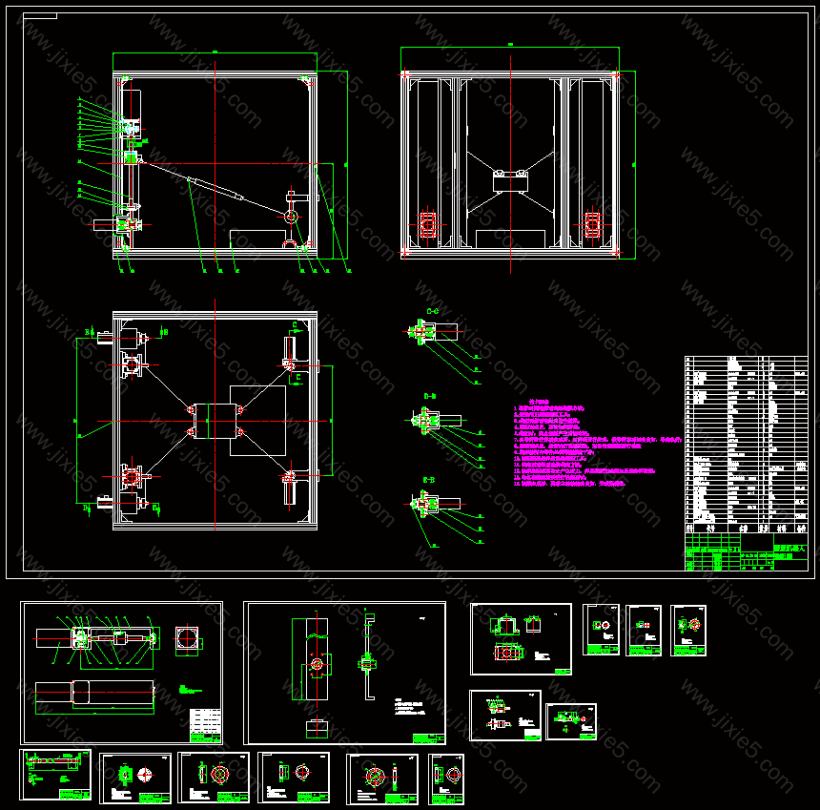
整机结构主要由电动机产生动力通过联轴器将需要的动力传递到丝杆上,丝杆带动丝杆螺母,从而带动整机运动,提高劳动生产率和生产自动化水平。更显示其优越性,有着广阔的发展前途。
本研究内容:
(1)刚柔混联下肢康复机器人装置总体结构设计。
(2)刚柔混联下肢康复机器人装置工作性能分析。
(3)电动机的选择。
(4)刚柔混联下肢康复机器人装置的传动系统、执行部件及机架设计。
(5)对设计零件进行设计计算分析和校核。
(6)绘制整机装配图及重要部件装配图和设计零件的零件图。
目录
目录IV
1绪论1
1.1国内外研究现状1
1.2刚柔混联下肢康复机器人原理及结构1
1.3本课题研究的内容及方法3
1.3.1主要的研究内容3
1.3.2设计要求3
2刚柔混联下肢康复机器人装置总体结构设计4
2.1设计的要求与数据4
2.2总体结构设计4
2.3康复机器人结构设计草图(框架图) 5
3康复机器人结构及传动设计8
3.1滚珠丝杆副的选择9
3.1.1导程确定9
3.1.2确定丝杆的等效转速9
3.1.3估计工作台质量及负重9
3.1.4确定丝杆的等效负载9
3.1.5确定丝杆所受的最大动载荷10
3.1.6精度的选择11
3.1.7选择滚珠丝杆型号11
3.2校核12
3.2.1临界压缩负荷验证12
3.2.2临界转速验证13
3.2.3丝杆拉压振动与扭转振动的固有频率13
3.3电机的选择14
3.3.1电机轴的转动惯量14
3.3.2电机扭矩计算15
4其它零部件的设计计算17
4.1电机轴的设计校核17
4.2键的校核18
4.3轴承的校核18
4.4力矩电机的选取19
5机架的设计23
5.1对机架结构的基本要求23
5.2机架的结构24
5.3横梁设计25
5.4机架的基本尺寸的确定25
5.5主要梁的强度校核25
结论28
参考文献29
致谢30














")
")
")
")
")
")
")

")
")