

装配图
三维数控锡丝点焊机结构设计(含cad图纸和word说明书)
随着工业自动化发展的需要,机械手在工业应用中越来越重要。文章主要叙述了机械手的设计计算过程。
首先,本文介绍机械手的作用,机械手的组成和分类,说明了自由度和机械手整体座标的形式。同时,本文给出了注塑机专用机械手的主要性能规格参量。
文章中介绍了注塑机专用机械手的设计理论与方法。全面详尽的讨论了注塑机专用机械手等主要部件的结构设计。
目录
摘要III
Abstract IV
目录V
第1章绪论7
1.1引言7
1.2注塑机专用机械手的含义7
1.3选题背景与意义7
1.4注塑机专用机械手的组成9
1.5注塑机专用机械手的发展及国内外发展趋势9
第2章注塑机专用机械手的设计方案12
2.1机械手的设计方法12
2.1.1机械手的选择与分析12
2.1.2直角坐标机器人的设计方法12
2.2机械手的结构设计17
2.2.1机器人的总体设计17
2.2.2机械手的传动部件设计17
2.2.3机械手的臂部设计18
2.3注塑机专用机械手的设计机构的特点19
第3章注塑机专用机械手的运动系统分析19
3.1注塑机专用机械手的运动系统分析19
3.2机器人的驱动方式20
第4章主要传动设计计算21
4.1确定系统脉冲当量21
4.2重量初步估算21
4.3滚珠丝杠计算、选择22
4.4伺服电机惯性负载的计算25
4.5伺服电机的选用26
第5章注塑机专用机械手的设计零件的设计28
5.1伺服电机的选择28
5.2同步带的设计30
5.2.1同步带计算选型33
5.2.2同步带的主要参数(结构部分) 35
5.2.3同步带的设计37
5.2.4同步带轮的设计37
5.3导轨的选择38
结论40
致谢41
参考文献42
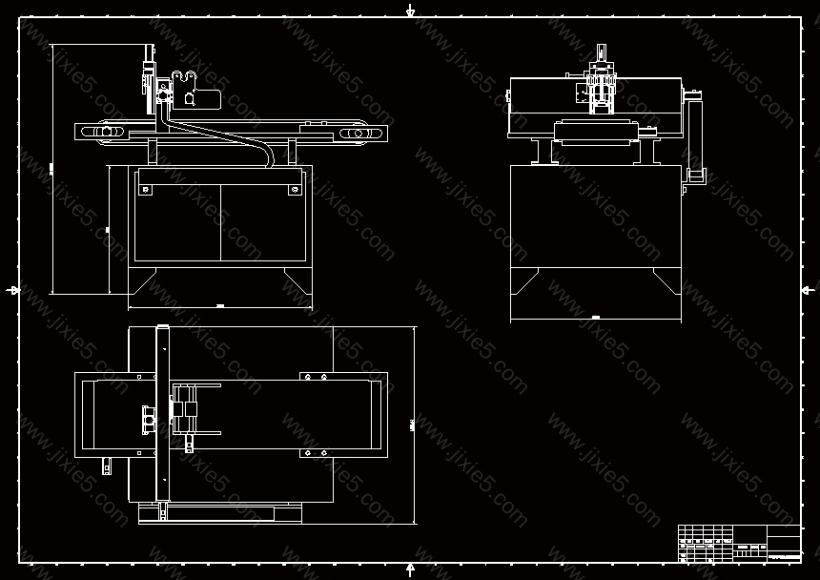
三轴移动检测机模型

1 滚珠丝杠
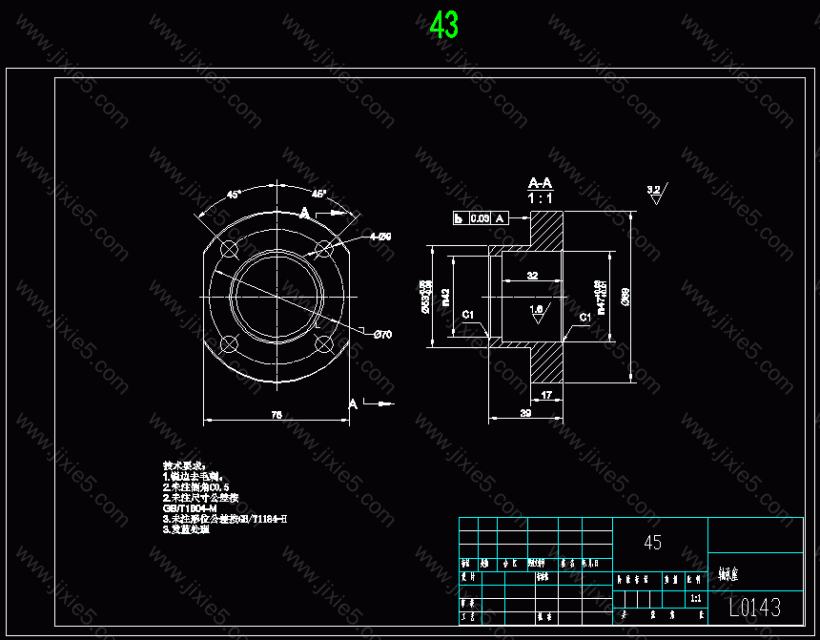
43 轴承座
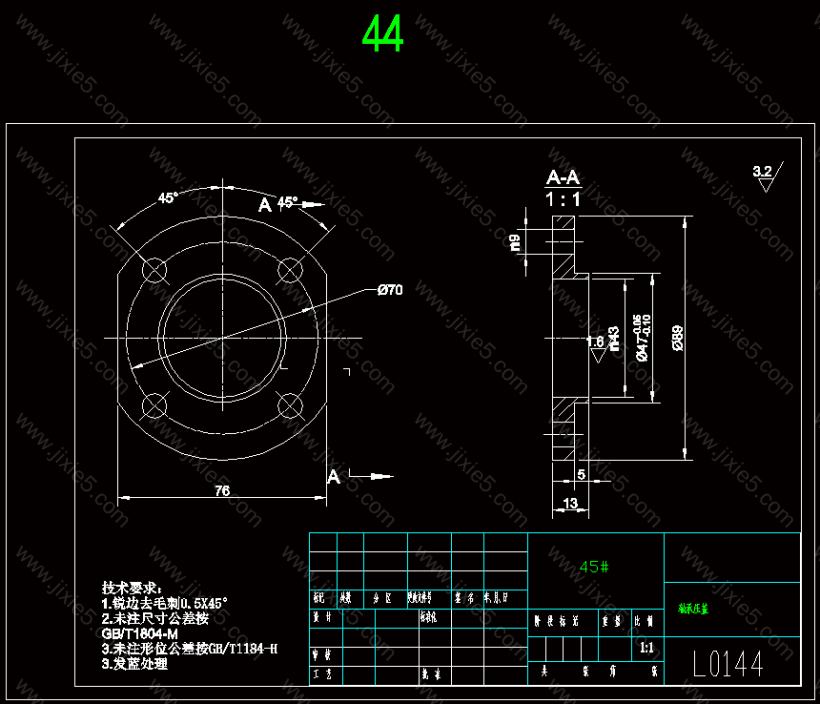
44 轴承压盖
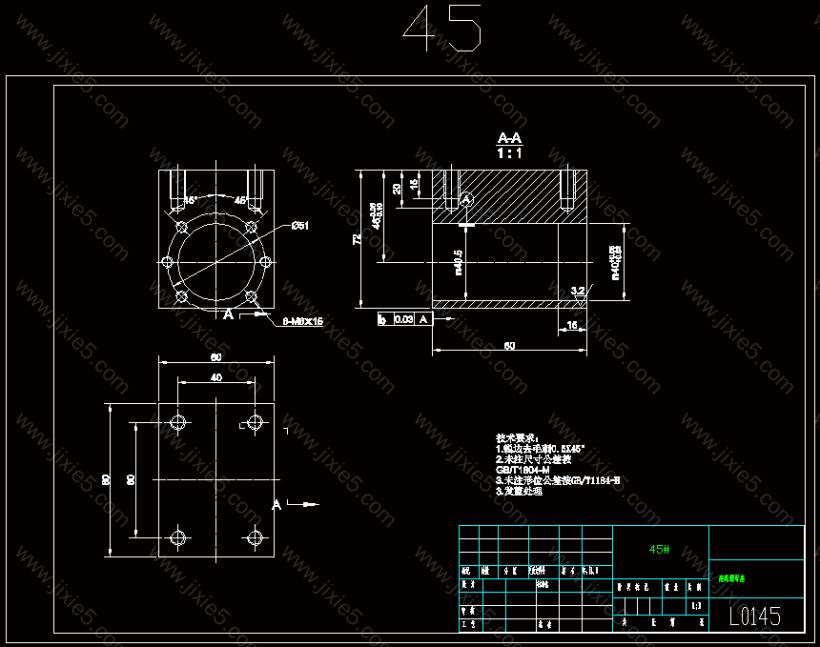
45 滚珠螺母座
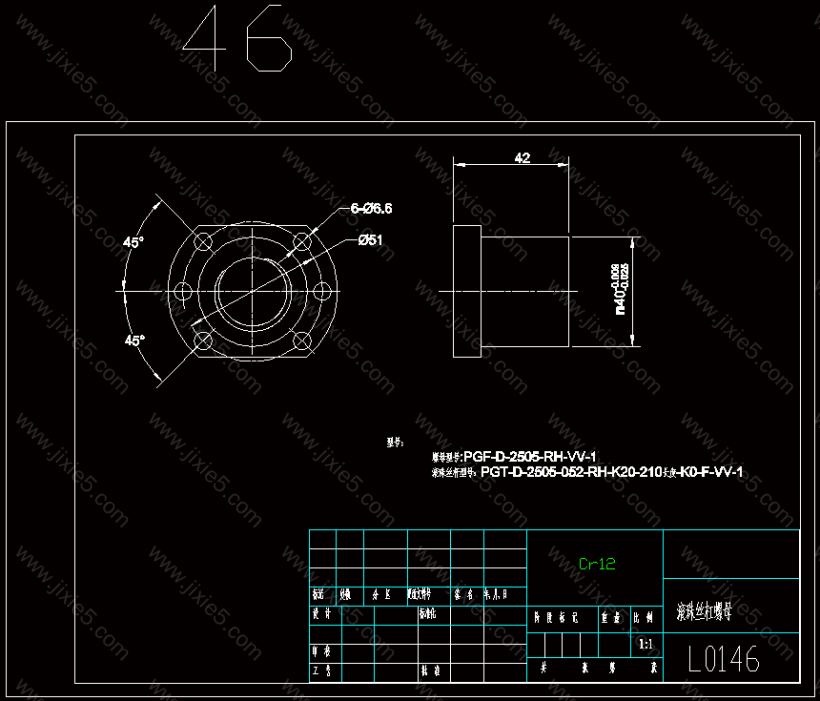
46 滚珠丝杠螺母
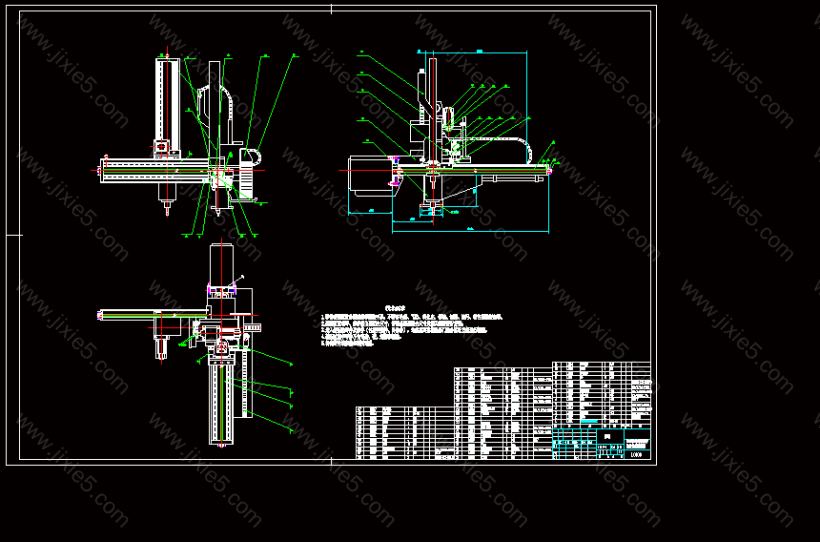
注塑机专用机械手的设计总装配图













")
")
")
")
")
")

")
")
")