
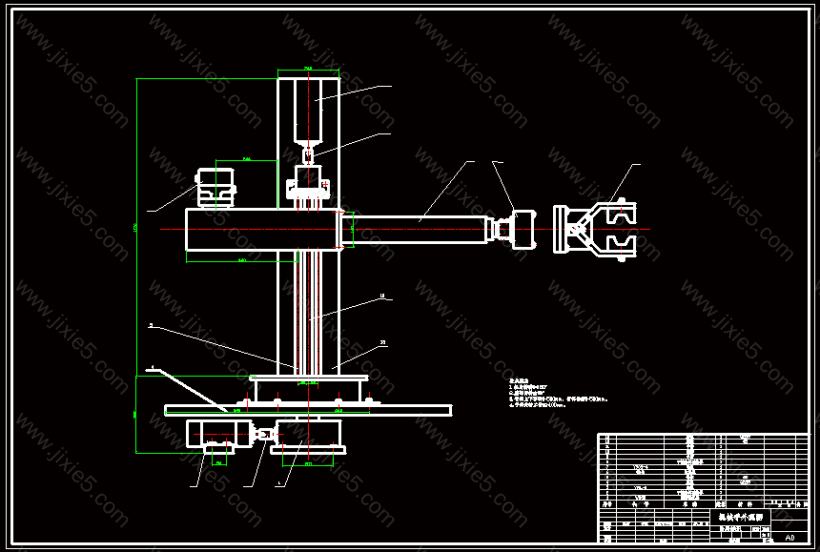
机械手外观图
目录
摘要1
第一章机械手设计任务书1
1.1设计目的1
1.2本课题的内容和要求2
第二章抓取机构设计4
2.1手部设计计算4
2.2腕部设计计算7
2.3臂伸缩机构设计8
第三章液压系统原理设计及草图11
3.1手部抓取缸11
3.2腕部摆动液压回路12
3.3小臂伸缩缸液压回路13
3.4总体系统图14
第四章机身机座的结构设计15
4.1电机的选择16
4.2减速器的选择17
4.3螺柱的设计与校核17
第五章机械手的定位与平稳性19
5.1常用的定位方式19
5.2影响平稳性和定位精度的因素19
5.3机械手运动的缓冲装置20
第六章机械手的控制21
第七章机械手的组成与分类22
7.1机械手组成22
7.2机械手分类24
第八章机械手Solidworks三维造型25
8.1上手爪造型26
8.2螺栓的绘制30
设计感想35
参考资料36
本课题是为普通车床配套而设计的上料机械手。工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题通过应用AutoCAD技术对机械手进行结构设计和液压传动原理设计,运用Solidworks技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。它能实行自动上料运动;在安装工件时,将工件送入卡盘中的夹紧运动等。上料机械手的运动速度是按着满足生产率的要求来设定。
(一、)原始数据及资料
(1、)原始数据:
a、生产纲领:100000件(两班制生产)
b、自由度(四个自由度)
臂转动180
臂上下运动500mm
臂伸长(收缩)500mm
手部转动±180
(2、)设计要求:
a、上料机械手结构设计图、装配图、各主要零件图(一套)
b、液压原理图(一张)
c、机械手三维造型
d、动作模拟仿真
e、设计计算说明书(一份)
(3、)技术要求
主要参数的确定:
a、坐标形式:直角坐标系
b、臂的运动行程:伸缩运动500mm,回转运动180。
c、运动速度:使生产率满足生产纲领的要求即可。
d、控制方式:起止设定位置。
e、定位精度:±0.5mm。
f、手指握力:392N
g、驱动方式:液压驱动。
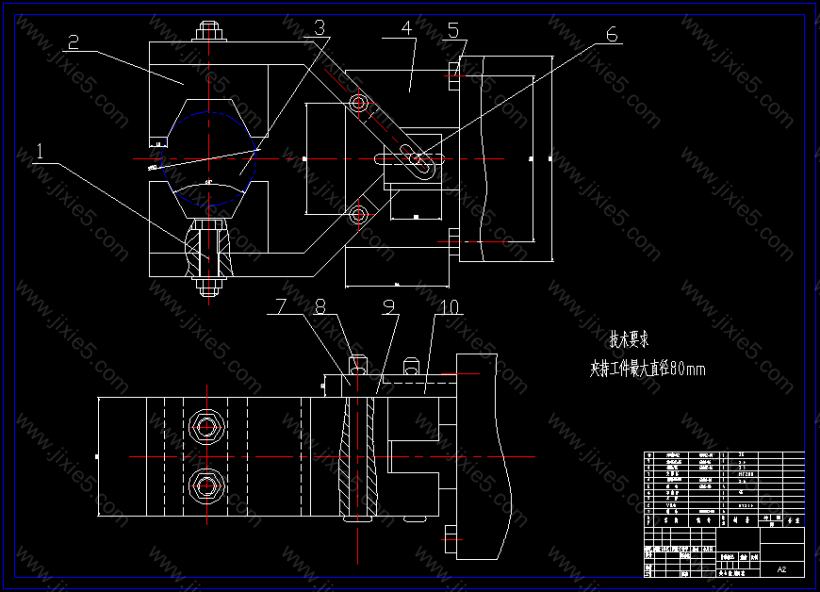
机械手爪装配图
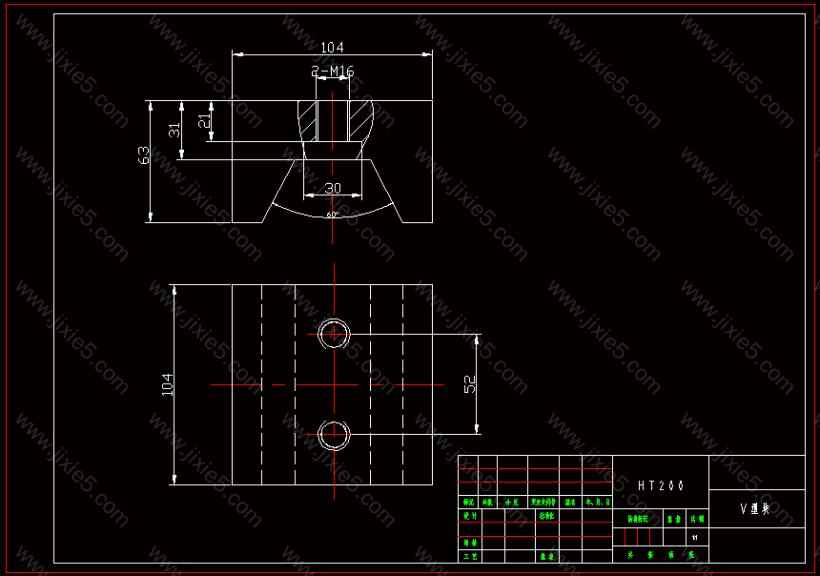
V型块图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!























CAD总装配图")
CAD装配简图1")

