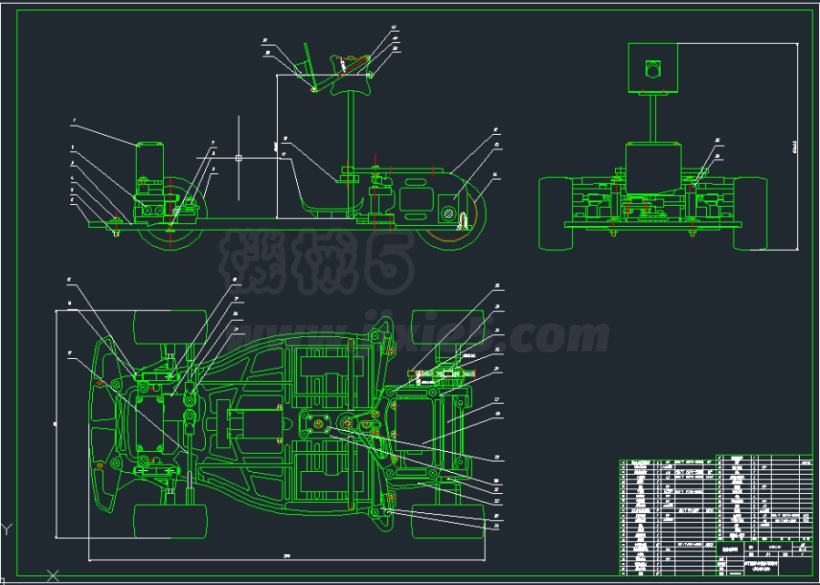
视觉识别机器人CAD图
(任务书,开题报告,16800字,cad,电路图,录像,答辩PPT)
该智能车控制系统采用MC9S12XS128的16位单片机作为的核心控制单元,通过CCD模拟摄像头采集道路图像,将处理的信号输入核心控制单元,控制单驱动的模型小车沿着白底黑线的跑道自动寻迹。在控制策略上,根据采集到的数据分析行驶路径以及对起跑线进行检测,采用PID算法对赛车的直流电机进行闭环控制,并判断跑道的弯曲程度采用PD的转向控制策略。在机械结构方面,通过对模型小车参数的优化,和对舵机输出力臂的改造,进一步提高了赛车的性能。

视觉识别机器人电路图


")