

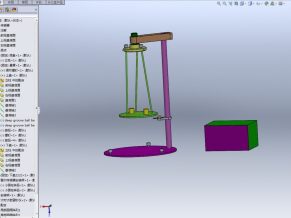
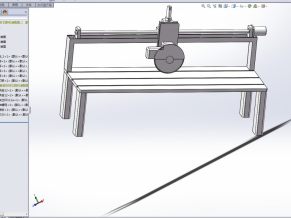
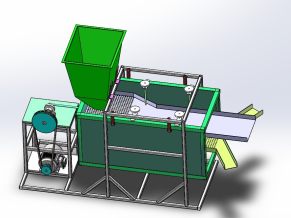
三维截图
已知整个单自由度越障机器人中零件的重量,我们取总重量为10Kg,电机额定转速为1440r/m
本文运用大学所学的知识,提出了单自由度越障机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了单自由度越障机器人总的指导思想,从而得出了该单自由度越障机器人的优点是高效,经济,并且变化灵活,多样,运行平稳的结论。
关键词:发展;单自由度越障机器人;结构;高效
摘要...................................................................i
ABSTRACT ...........................................................ii
目录...................................................................iii
1绪论...................................................................1
1.1课题的来源与研究的目的和意义...................................1
1.2单自由度越障机器人的发展现状...................................2
1.3本课题研究的内容...................................................4
1.4.1草图绘制...................................................5
1.4.2基准特征,参考几何体的创建...................................6
1.4.3拉伸、旋转、扫描和放样特征建...........................7
1.4.4工程图的设计...........................................10
1.4.5装配设计...................................................11
2单自由度越障机器人总体结构的设计...................................12
2.1单自由度越障机器人的总体方桉图...................................12
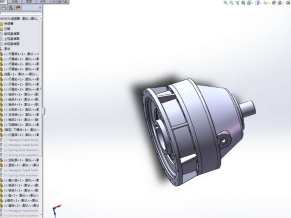
3机械传动部分的设计计算...........................................17
3.1电机的选型计算...................................................18
3.2齿轮传动的设计计算...........................................19
3.3齿轮齿条的选型计算...........................................19
4各主要零部件强度的校核...........................................24
4.1转动轴强度的校核与计算...........................................25
4.2齿轮强度的校核计算...........................................26
结论...................................................................26
致谢...................................................................27
参考文献...........................................................28
附录一...................................................................32
附录二...................................................................40

A0-装配图

A3-太阳轮

A4-传动链轮

A4-转向齿轮

A0-传动轴

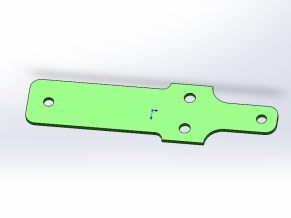
A0-前支架

A0-主体

A0-转向齿条
















")


