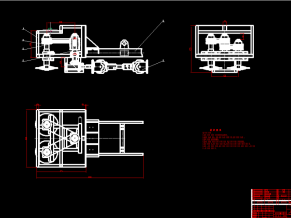
总装
此机械手采用全液压驱动方式,采用球坐标形式,自由度数为六,分别为Z方向的升降运动;绕Z方向的回转运动;手臂的仰俯运动;X方向的伸缩运动;手腕的仰俯运动;绕X方向的回转运动;主要完成手部结构、腕部结构、臂部结构和机身机构的设计,各部分缸体的结构位置的设计计算,各自由度运动的实现。具体结构设计过程中用了大量时间对机械手各部分进行了校核。在机构满足设计参数的条件下,使结构设计尽量优化。

简介

目录1

目录2

内容

升降缸活塞杆

手部结构图

腕部_A0

小臂A1
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!