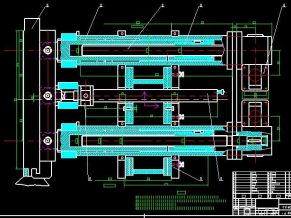
总装图A0
本设计的主要内容是螺旋驱动管道机器人的组成及工作原理,对机器人的机械结构进行了设计,并且分析了其在弯管内的几何与运动约束条件。新型的旋转体和保持体结构的设计,使此管道机器人具有较大的牵引力和移动速度。随着时间的推移,非工业领域的自动化程度越来越高,智能机器人的应用领域越来越广泛。总体趋势是,从狭义的机器人概念向广义的机器人技术概念转移,从工业机器人产业向解决方案业务的机器人技术产业发展。机器人技术的内涵已变为灵活应用机器人技术的、具有实际动作功能的智能化系统。机器人结构越来越灵巧,控制系统愈来愈小,其智能也越来越高,并正朝着一体化方向发展。机器人采用节段式设计,使得其具有强大的功能扩展性。在制冷、化工、核电站等领域,采用常规方法对小型管道检测存在中毒、辐射等危险,且费时费力。因此,螺旋驱动管道机器人在细小管道检测方面具有良好的应用前景,并且其机械结构具有较高的实用价值和学术意义。螺旋轮式管道机器人特点:轮式行走具有结构简单、行走连续平稳的特点。

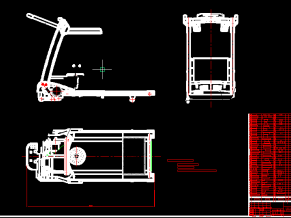
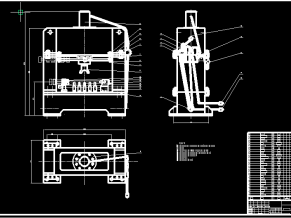
部件装配图A0

车轮支架A3

方案设计

简介

内容目录1

内容目录2

全部内容

蜗轮A3