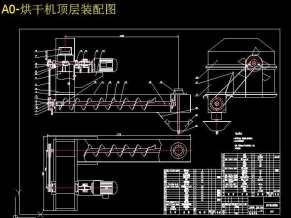
A0-ЛњаЕЪжзАХфЭМ
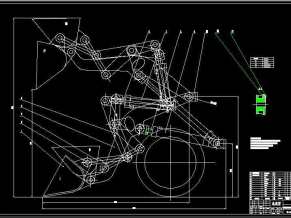
БОжївЊНщЩмСЫГхДВЩЯЯТСЯЛњаЕЪжЕФЩшМЦЙ§ГЬЁЃдкВщдФСЫвЛЯЕСаВЮПМзЪСЯвдКѓЃЌВЮдФЙњФкЕФЩшМЦЧщПіЁЃбЁгУдВжљзљБъКЭШ§здгЩЖШЁЃЛњаЕЪжЕФИїжДааЛњЙЙЃЌАќРЈ:ЪжВПЁЂЪжБлЕШВПЁЃгУЦјСїИКбЙЪНЮќХЬРДЮќШЁАхСЯЙЄМўЁЃ
дкЗжЮіСЫОпЬхЙЄзївЊЧѓЃЌЖдИіЗНАИНјааЖдБШжЎКѓЃЌзлКЯПМТЧИїИівђЫиЁЃЛњаЕЪжбќВПЕФа§зЊдЫЖЏашвЊвЛЖЈЕФЖЈЮЛПижЦОЋЖШЃЌЙЪВЩгУВННјЕчЛњЧ§ЖЏРДЪЕЯжЃЛвђЮЊВЩгУвКбЙжДааИзРДзіЫЎЦНЪжБлКЭДЙжБЪжБлЃЌЙЪДѓаЁБлОљВЩгУвКбЙЧ§ЖЏЃЛЛњаЕЪжЕФЪжВПНсЙЙЩшМЦЃЌвђЮЊЙЄМўЪЧАхСЯЃЌЪЙгУЦјСїИКбЙЪНЮќХЬ.ВЩгУЦјЖЏЧ§ЖЏЁЃ

A1-бќВПНсЙЙЭМ

A1--вКбЙЯЕЭГЭМ

A1-ецПеЯЕЭГЙмТЗЭМ

A2-ЛњаЕЪжЪжБлСЊНсзљ

A3-ЙЄађЭМ

A3-ЙЄзїЭМ

ФПТМЖў

ФПТМвЛ

зЪСЯзмдЄРР

зжЪ§ЭГМЦ
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ