
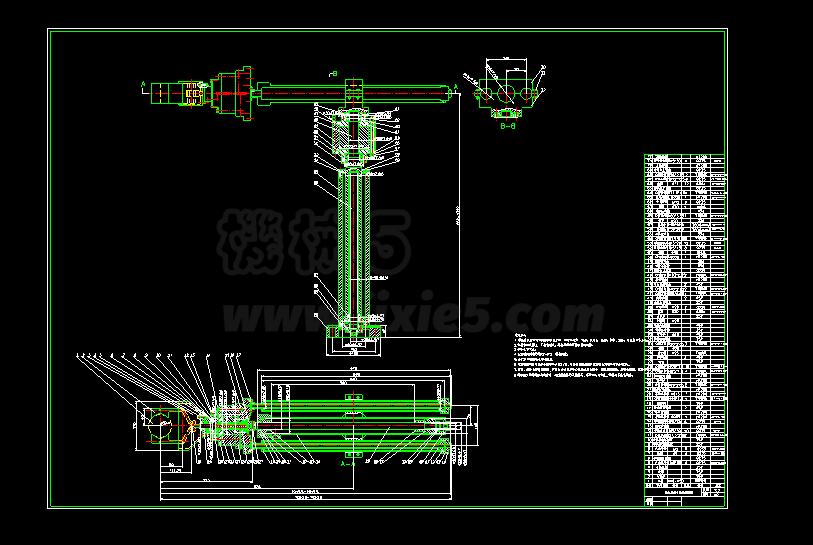
搬运机械手机构装配图
简介:机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。机械手能模仿人手和臂的某些动作功能,用于按固定程序抓娶搬运物体或操作工具的自动操作装置。它可以代替人的繁重劳动以实现生产自动化和机械化,能在有害环境下操作以保证人的安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。在工业部门中应用的机械手称为工业机械手。
目录
第一章绪论1
1.1机械手的研究概况1
1.2机械手发展方向1
1.3工业机械手在生产中的应用2
1.4本设计中研究的主要内容3
第二章搬运机械手的总体设计方案4
2.1机械手的组成4
2.2机械手基本结构的选择4
2.3机械手的执行机构4
2.4机械手的驱动机构4
2.5机械手的控制方式选择5
2.6机械手的技术参数列表5
第三章搬运机械手手臂各部件的设计6
3.1机械手手部的设计计算6
3.1.1手部设计基本要求6
3.1.2手部机构的选择6
3.1.3手抓的设计计算6
3.2腕部的设计计算17
3.2.1腕部设计基本要求17
3.2.2腕部机构的选择17
3.2.3腕部的设计计算18
3.3臂部的设计计算24
3.3.1臂部设计基本要求24
3.3.2臂部机构方案的选择25
3.3.3臂部的设计计算27
第四章机身的设计计算40
4.1机身的总体设计40
4.2机身的升降机构设计计算41
4.2.1手臂偏重力矩的计算41
4.2.2升降导向立柱不自锁条件分析计算42
4.2.3机身升降液压缸驱动力矩的计算43
4.2.4手臂升降液压缸参数计算44
4.3机身的回转机构设计计算49
4.3.1机身回转液压缸驱动力矩计算49
4.3.2机身回转液压缸主要参数51
4.3.4机身回转液压缸螺钉的计算52
4.3.5动片与输出轴间的连接螺钉计算53
4.3.6机身回转液压缸筒的壁厚校核54
4.4联接板的设计55
4.4.1联接板的介绍及作用55
第五章液压驱动系统与控制电路的设计57
5.1驱动系统设计要求57
5.2驱动系统设计方案57
5.3驱动系统设计58
5.3.1分功能设计分析58
5.3.2液压泵的确定与所需功率计算59
5.4控制电路设计66
参考文献67
致谢68
附录A 69
设计目录

设计说明书
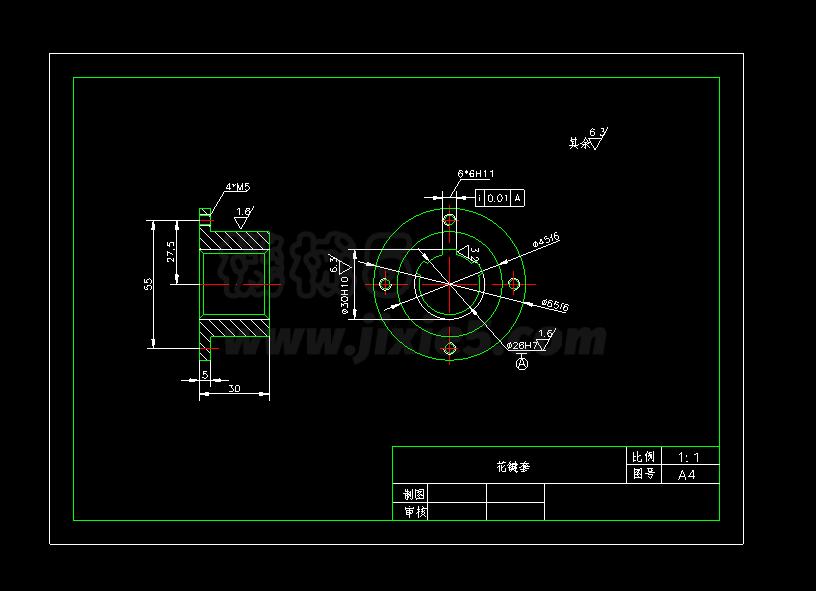
花键套
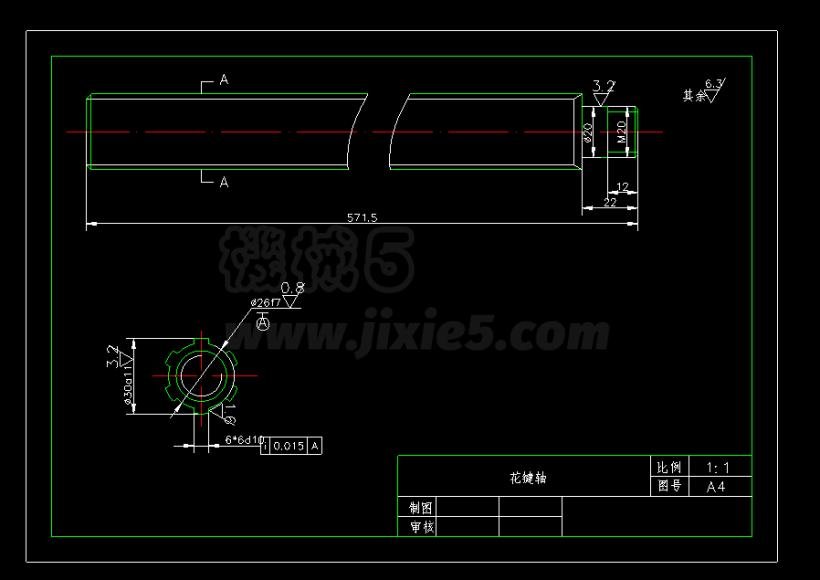
花键轴
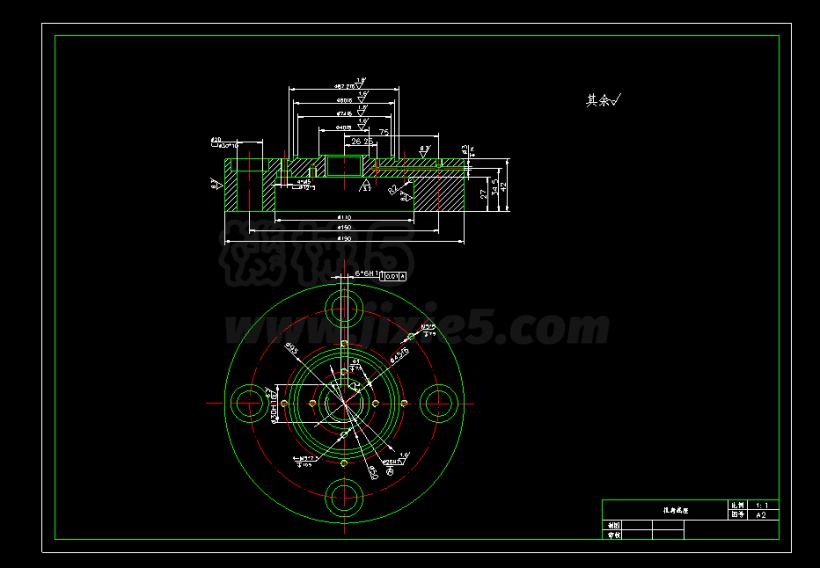
机身底座
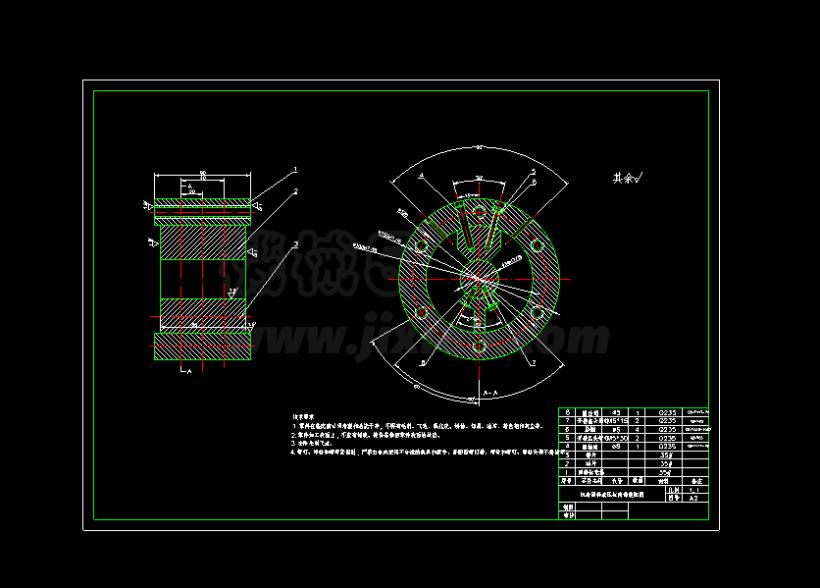
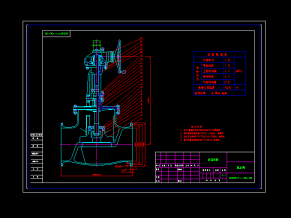
机身回转液压缸内部装配图
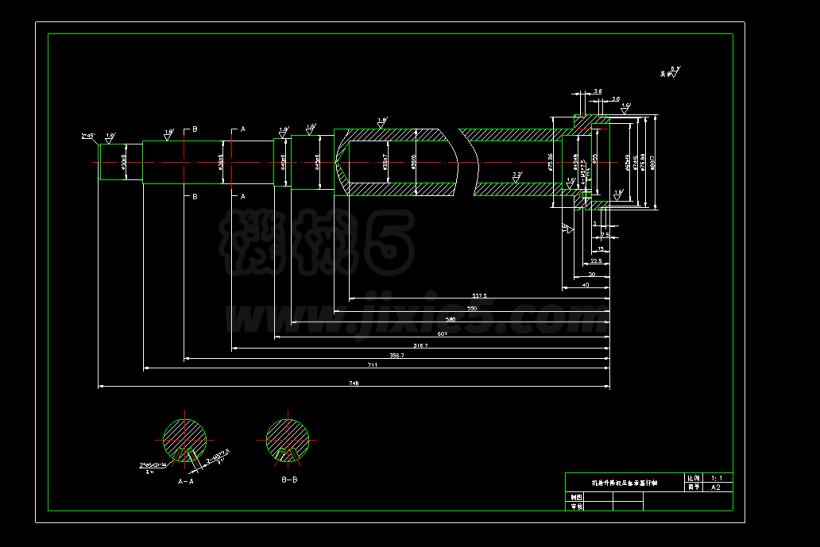
机身升降液压缸活塞杆轴
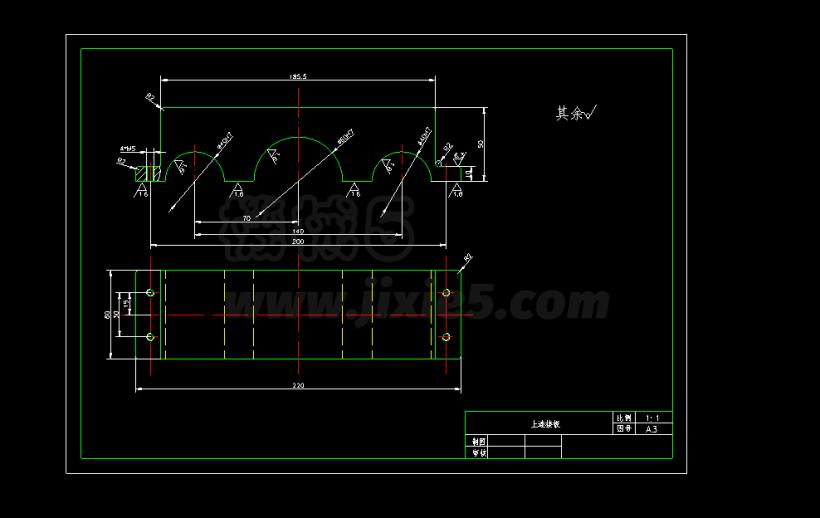
上连接板

文件清单









![[学士]某保险公司办公大楼设计CAD图纸说明书](http://img.jixie5.com/d/file/2021/06/05/4c8339a26077d40c90275ccc5b8f09ad.png@!l)







")





