

4三维总装图
旋转式双轮电动轮椅设计
摘要
本课题设计的目的是通过设计出一种能够在普通小区,公共场合爬楼梯的辅助机构。我们首先对国内外助残轮椅市场的现状做了简单的总结,最终结果显示现如今市面上的助残轮椅大部分价格昂贵,一般消费者不能承受。进而对比国内外的各种爬楼梯轮椅,取其优点,综合考虑,确立设计思想。
本设计在传统电动轮椅基础上对其结构进行改变后,采用两个电机驱动平地行走机构和翻转轮系;通过一对电机驱动行星轮转动,并保持后侧2个轮的轮毂电机抱死,从而行星架转动带动车轮交替着地实现爬楼。姿态调整装置用于在上下楼梯时自动调整和控制轮椅的重心。设计功能的实现主要由平地行走、翻转轮系传动结构、位姿调整和驱动系统几部分组成。轮椅的整体形状与市场上普通的电动轮椅相似。平衡系统可以在电气控制时运用陀螺仪。
关键词:爬楼梯;机械设计;轮椅;行星轮
Abstract
The purpose of this design is to design a kind of auxiliary mechanism that can climb stairs in common areas, so as to ultimately design a kind of climbingwheelchair robotwith reasonable prices, advanced performance, and economy. We first made a brief summary investigation of the domestic and foreignwheelchairs for the disabled. The final result shows that most of the disabledwheelchairs available in the market today are expensive and cannot be afforded by the average consumer. Then compare domestic and foreignwheelchairs for climbing stairs, take advantage of them, and consider comprehensively to establish design ideas.
This design is based on the structure of the traditional electricwheelchair, two motors are used to drive the flatwalking mechanism and the turningwheel train; the pair of motors drives the planetwheels to turn and keeps the twowheels of the rearwheel hub motor locked. As a result, the rotation of the planet carrier drives thewheels to alternately climb stairs. The posture adjustment device is used to automatically adjust the control center of gravitywhen thewheelchair goes up and down the stairs. The realization of the design function is mainly composed of several parts such as flatwalking, turningwheel train transmission structure, posture adjustment and driving system.
The overall shape of thewheelchair is similar to that of a general electricwheelchair on the market. The balance system can use a gyroscope during electrical control.
Keywords:Wheelchair, control system, two-wheeled type, mechanical structure
目录
引言2
第一章绪论3
1.1研究背景3
1.2国内外研究现状4
1.2.1履带式爬楼轮椅4
1.2.2步进支撑式爬楼轮椅5
1.2.3行星轮式爬楼轮椅6
1.3国内研究现状7
1.4设计意义7
1.5设计内容8
第二章总体方案8
2.1设计要求8
2.2总体布局9
2.3本章小结9
第三章结构设计10
3.1轮椅总体尺寸10
3.2椅背、椅身设计11
3.2.1尺寸设计11
3.3位姿调整机构12
3.4车轮结构13
3.4.1车轮尺寸13
3.5翻转爬楼机构13
3.5.1爬楼机构组成13
3.5.2翻转电机的选取14
3.5.3减速器选型15
3.5.4翻转机构机构的轴设计15
3.5.5翻转齿轮的设计17
3.5.6齿轮材料的选取17
3.6平地行走机构18
3.6.1总体设计18
3.6.2功率计算18
3.6.3电动机的选取20
3.6.4减速器选型21
3.6.5平地行走机构的轴设计21
3.6.6定轴轮系齿轮设计22
3.6.7末端齿轮设计23
3.7控制手柄23
3.7.1功能介绍23
3.7.2基本原理24
3.8本章小结24
第四章控制系统25
4.1硬件选用25
4.1.1单片机25
4.2控制系统设计27
4.2.1概述27
4.2.2流程图设计28
4.3本章小结28
第五章总结27
参考文献28
致谢29

A装配图

零件图中心轴-A2

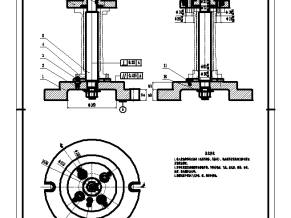
万向轮部装图

万向轮零件-车轮

万向轮零件-隔套

万向轮零件-固定板

万向轮零件-销轴

万向轮零件-销轴2

万向轮零件-支撑板

万向轮零件-支撑板1

万向轮零件-轴承座

1字数

2摘要

3设计所包含文件

5目录



















")





