三维图
摘要:本课题来自于生产实际,本次设计要做的是一种焊接式机器人的结构设计,机器人的主要特性是其可以在系统的控制下,直接完成对特定目标的焊接操作,工作效率高。按照要求设计的焊接机器人共有着六个自由度,其中机器人腕部的部分设计成含有三个自由度,腰部、大臂和小臂都有一个自由度的设计,机器人是使用伺服电机驱动。腰部在空间中的回转是选用蜗轮蜗杆机构来传动,小臂在平面中的俯仰是采用铰链四杆机构的方案传动动力,腕部自由度是选用直齿圆柱齿轮和锥齿轮传动变化运动方向来实现的,这次的课题主要是介绍关于焊接机器人的部分常识和运行时各部分的原理,包括机器人的组成要素以及涉及到的技术参数。设计按实际情况考虑,就焊接机器人在设计中的各种问题进行了探讨,同时使用Solidworks三维和AutoCAD二维软件做出了机器人的零件图和三维造型图。
关键词:焊接机器人、六自由度、结构设计

机器人装配图

腕部部装图

传动原理图

底盘旋转涡轮轴

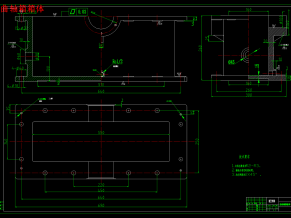
底座

电机齿轮连接轴

减速机安装法兰

驱动臂座

全部文件

三维

三维图纸

腕部中心轴1

字数和目录