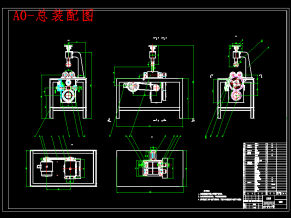
A0总装图
摘要
为了适应中国部分城市老龄化的现状和老人及残障人士的需求,设计一种方便坐立并轻松站立的辅助型座椅,可实现座椅的移动,升降,转向等功能,为未来老人和残疾人的家居生活提供新模式和新概念并促进助老/助残系列化服务机器人产品的发展智能机器人的应用。
本文运用机械系统动力学分析软件ADAMS对辅助站立座椅的推杆及座椅前板进行运动学与动力学分析和优化。基于AT89C51单片机实现对座椅的控制,通过对电动推杆及直流电机的正反转控制,实现对座椅位姿的调节。使用三维建模软件SOLIDWORKS对座椅建模并进行干涉检验。
关键词:辅助站立座椅,单片机,ADAMS,连杆机构
目录
1绪论1
1.1课题的来源、目的、意义1
1.2国内外基本情况2
1.3本文主要研究内容6
1.4本章小结8
2座椅结构的整体方案8
2.1护理要求8
2.2辅助站立座椅的总体方案8
2.5构想的成型9
2.6辅助站立座椅的组成10
2.7本章小结10
3座椅的结构设计11
3.1引言11
3.2辅助站立座椅的机构介绍11
3.3初步确定机构中个杆件的尺寸12
3.4辅助站立轮椅的三维建模与干涉检验13
3.5本章小结14
4座椅部分零件的校核15
4.1引言15
4.2力学计算15
4.3本章小结19
5座椅推杆的动力分析及前座板的运动分析20
5.1引言20
5.2运动机构的动力学分析20
5.3本章小结39
6.辅助站立轮椅控制系统设计40
6.1引言40
6.2控制系统方案40
6.3控制系统逻辑40
6.4控制系统硬件设计41
6.5按键电路互锁46
6.6本章小结46
7结论47
8参考文献48
9致谢49

A1底架

A1电路图

A3连杆1

A3连杆2

字数

摘要

目录

设计所包含文件