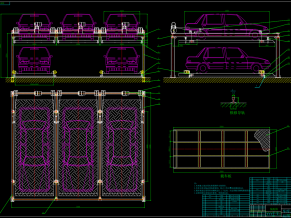
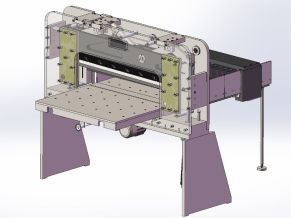
文件包含三维图和二维图以及说明书。设计内容为基于视觉分拣搬运机器人设计的机构设计。仅供大家参考!其工作方式为:通过视觉系统识别物件表面的二维码,从而确定物件的派送区域,将信息传递给抓取系统进行抓取,抓稳之后,系统控制搬运系统将物件送至指定的分拣地点。其中抓取系统采用两指式抓取机械手抓,搬运系统采用直角坐标式移动机器人的结构,既采用滚珠丝杠与直线导轨配合,形成X、Y、Z三个方向的直线运动。
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:
























")
")
")