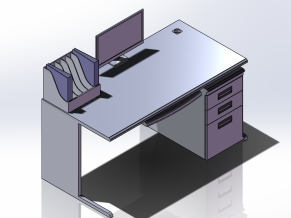
预览图1
移动救援机器人3D模型SolidWorks 2014设计有参数sldasm﹑sldprt源文件提供,移动救援机器人采用三角履带轮运动机制,实现灵活的流动性。
软件版本:SolidWorks
文件格式:Sldprt/Sldasm
移动救援机器人3D模型SolidWorks 2014设计有参数sldasm﹑sldprt源文件提供,移动救援机器人采用三角履带轮运动机制,实现灵活的流动性。

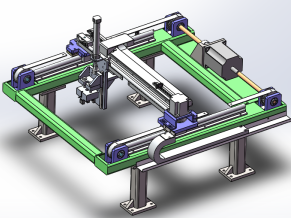
预览图2

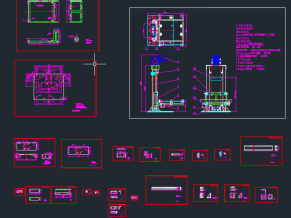
预览图3

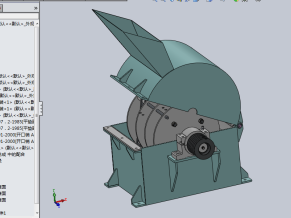
预览图4
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!