

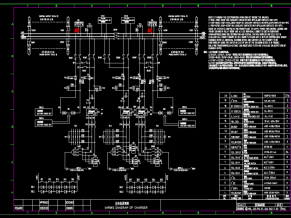
装配图
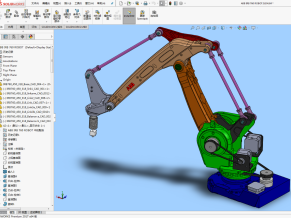
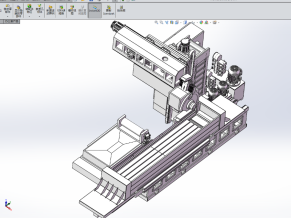
该设备是一款机械手抓举机构,能模仿人手和臂的某些动作功能,用以按固定程序抓娶搬运物件或操作工具的自动操作装置,分机械手臂,机械手,工作平台三部分,可以实现空间6自由度的任意运动,一般用于流水线搬运物体或在机械手部分配上不同操作工具可实现多种功能,模型中包含手臂和机械手各个装配零部件。
图纸结构复杂详细,设计合理,具有极高的参考价值,非常值得借鉴与学习,可用多种三维软件打开,欢迎大家下载参考。

局部图

局部图

局部图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!















")



