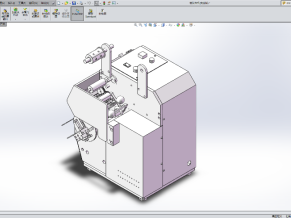
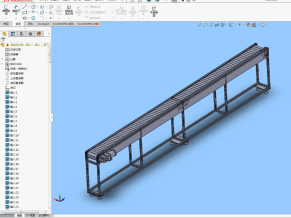
装配图
在实际应用中焊接机器人最普遍的方式主要有两种:点焊和电弧焊。焊接机器人就是在焊接生产领域中代替焊工从事焊接任务的工业机器人。在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接、卸料等多种任务。图纸结构复杂详细,设计合理,具有极高的参考价值,非常值得借鉴与学习,可用多种三维软件打开,欢迎大家下载参考。
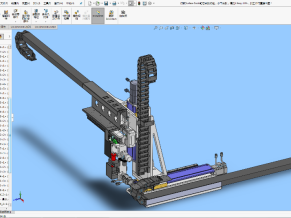
线框图
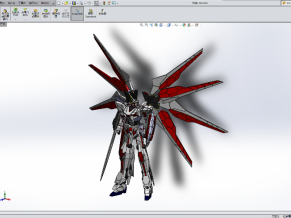
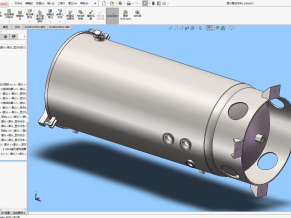
局部图
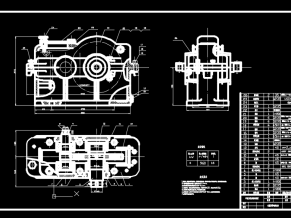
主视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: